
This is an old revision of the document!
Reverse Parking Sensor
Autor: Teodora RUMÂNU
Introducere
- Proiectul constă în atenționarea prin alarmă și lumini atunci când mașina se află la o anumita distanța fața de un obstacol.
- Scopul proiectului este acela de a facilita parcarea unei mașini și de a preveni o eventuală coliziune.
Descriere generală
Pentru a înțelege modul de funcționare, trebuie avute în vedere două praguri pentru distanță - unul aflat la 10cm, iar celălalt aflat la 50cm - care descriu trei zone:

- Zona verde: aflată după pragul de 50cm, la o distanță suficient de mare astfel încât să ofere siguranță
- Zona galbena: are limitele între cele două praguri, descrie o distanță mai puțin sigură, dar nu alarmantă, însă este nevoie de un avertisment pentru a preveni un potențial accident
- Zona roșie: se află sub pragul de 10cm, la o distanță critică, alarmantă, foarte aproape de impact cu obstacolul
Schema bloc

Hardware Design
Lista de Piese
Schema electrică

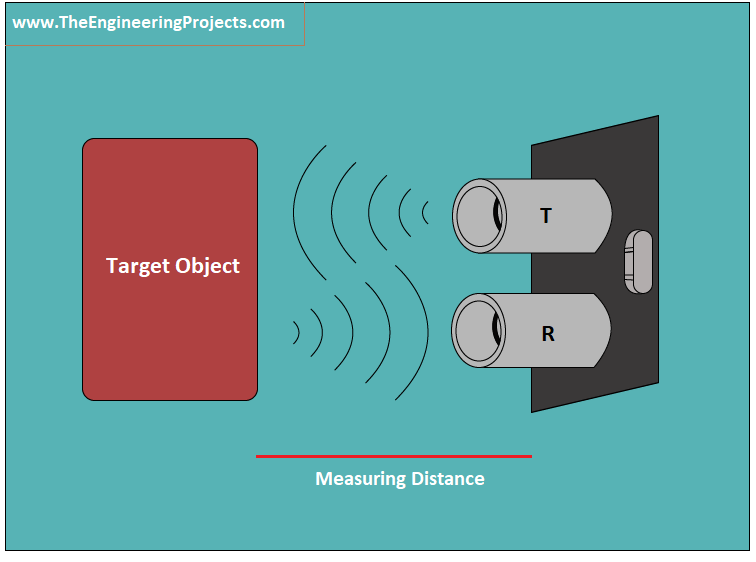
Senzor Ultrasonic HC-SR04
- funcționează precum un aparat de sonar - emite ultrasunete la o frecvență de 40000Hz în aer iar dacă acestea lovesc un obiect, sunt reflectate, conform schemei:
- detectează obiecte de la 2 cm la 4m distanță
- are 4 pini - GND, VCC, Trig și Echo
- pinii GND și VCC se conectează la pinii echivalenți de pe Breadboard, care la rândul lor sunt conectați la pinii de GND și VCC de pe placă
- pinul Trig este conectat la pinul 10 de pe plăcuța Arduino, iar Echo, la pinul 9
Buzzer
- de tip Piezoelectric
- are incorporate două fire, unul negru(GND) și unul roșu
- firul de GND este conectat la pinul corespunzător de pe Breadboard, iar firul roșu este conectat la pinul 2 de pe Arduino
Software Design
* Mediu de dezvoltare si compilare: Arduino IDE
Implementare
- inainte de setup():
- definire pini ce urmeaza sa fie folositi
- definire variablie pentru timp si distanta
- setup():
- setare pini pentru OUTPUT/INPUT
- start interfata seriala
- loop():
- curatare pin TRIG prin setarea acestuia la LOw pentru 5 microsecunde
- TRIG este setat la HIGH pentru 10 microsecunde pentru a putea emite ultrasunetele
- pentru detectarea
Rezultate Obținute
Concluzii
Download
Bibliografie/Resurse
