
This is an old revision of the document!
Wearable Running Monitoring System: GPS Tracker with Inertial Correction
Introducere
A key motivation behind this work is addressing the inherent limitations of standalone GPS-based measurements, particularly the phenomenon of GPS drift, which leads to error accumulation during stationary periods. To mitigate this issue, the system integrates a sensor fusion approach that combines absolute positioning data with inertial measurements, enabling the validation of real user movement and the filtering of spurious displacement.
Beyond its technical objectives, the system is also designed as a practical alternative to smartphone-based tracking, allowing the user to monitor running activity without relying on a mobile device, which may be inconvenient or prone to damage during physical activity. At the same time, the project serves as an exploration of the trade-offs between cost, hardware limitations, and performance, providing insight into how closely a low-budget embedded solution can approximate the behavior of commercial-grade systems.
Descriere generală
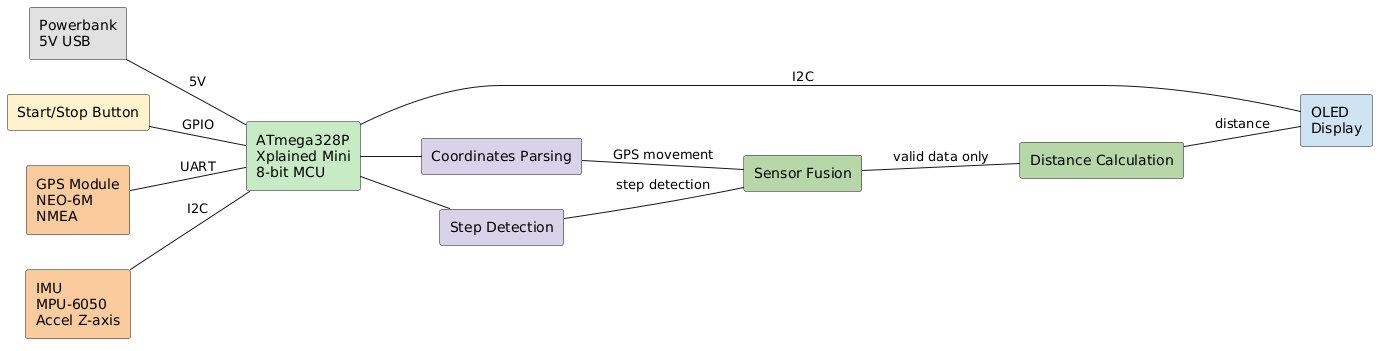
Main modules:
- Microcontroller (ATmega328P): coordinates the entire system, processes data, and implements the filtering algorithm.
- GPS Module (NEO-6M): provides geographic coordinates in the form of NMEA sentences via UART.
- Inertial Sensor (MPU-6050): detects user movement using the accelerometer (Z-axis).
- OLED Display (SSD1306): displays information to the user.
- Power Supply: 5V power bank for portability.
Module interaction:
- GPS sends coordinate data to the microcontroller
- MPU-6050 sends acceleration data
- The microcontroller processes data and applies the sensor fusion algorithm
- Distance is updated only if movement is validated
- Results are displayed on the OLED
A key contribution of this project is a lightweight sensor fusion mechanism that validates GPS-based displacement using inertial step detection. This approach significantly reduces GPS drift without relying on computationally expensive filtering algorithms, making it suitable for resource-constrained microcontrollers.
{kind=link}
Hardware Design
List of components:
| Component | Model / Specifications |
|---|---|
| Microcontroller | ATmega328P Xplained Mini |
| GPS Module | u-blox NEO-6M V2 + 25x25mm ceramic antenna |
| Inertial Sensor (IMU) | MPU-6050 (Accelerometer + Gyroscope) |
| Display | 0.96” OLED, SSD1306 (I2C) |
| Power Supply | 5V Powerbank |
| Breadboard | 400 points |
| Wires | 10cm DuPont wires |
| Mounting elements | Spacers / Patafix / pins |
| Enclosure | 3D printed case |
Software Design
- development environment (if any) (e.g. AVR Studio, CodeVisionAVR)
- libraries and 3rd-party sources (e.g. Procyon AVRlib)
- algorithms and data structures to be implemented
- (stage 3) implemented sources and functions
Rezultate Obţinute
Concluzii
Download
Files should be uploaded using Add Images or other files. Namespace format: :pm:prj20??:c? or :pm:prj20??:c?:student_name.
Jurnal
Bibliografie/Resurse
