
Robot umidificare camera
Introducere
Proiectul consta intr-un robot care se deplaseaza autonom printr-o camera. Are un senzor ultrasonic de distanta care il ajuta sa evite obstacolele. Cand detecteaza o zona care nu corespunde standardului de umidificare setat, porneste un diffuser care imprastie apa in aer.
Descriere generală
Robotul se va deplasa pe 4 roti. Senzorul ultrasonic de distanta primeste in permanenta informatii si le analizeaza. Cand este suficient de aproape de un obstacol, se roteste. Astfel, parcurge diferite zone din camera in care se afla si masoara constant umiditatea. Daca nu se incadreaza in standardul setat, activeaza un water diffuser pentru a creste nivelul.

Hardware Design
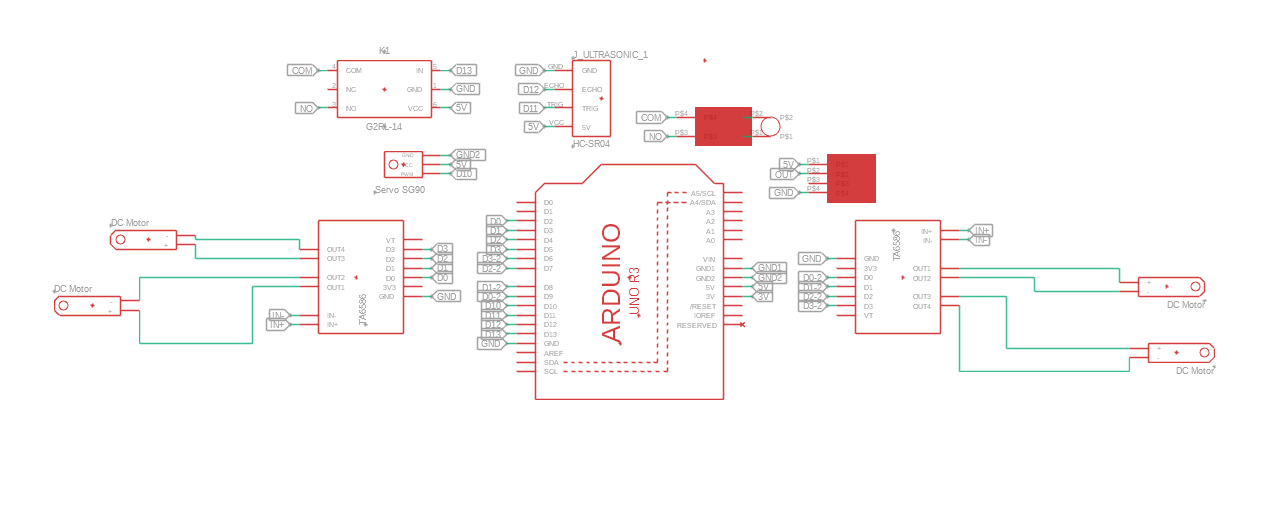
- Arduino Uno
- Sursa de alimentare
- Senzor ultrasonic de distanta
- Driver pentru motor
- 4 x Motoare pentru roti
- Servomotor
- Roti
- Senzor de umiditate
- Releu
- Diffuser
- Fire conectoare
- Breadboard
Software Design
Bibliotecile utilizate sunt:
- NewPing.h - pentru senzorul ultrasonic de distanță
- Servo.h - pentru micro servomotor
- dht11.h - pentru senzorul de umiditate și temperatură
În funcție de metoda apelată, mașina poate executa următoarele acțiuni:
- să citească distanța de la senzor - funcția readPing()
- să se deplaseze în față - funcția moveForward()
- să se deplaseze în spate - funcția moveBackward()
- să frâneze - funcția stopMotors()
- să se rotească la stânga - funcția turnLeft()
- să se rotească la dreapta - funcția turnRight()
- să evalueze și să decidă noua direcție de deplasare (dacă distanța față de obstacol e prea mică) - funcția findNewDirection()
În plus, am scris propriile funcții pentru mișcarea motoarelor (4 funcții) care primesc ca parametru un bool reprezentând direcția de deplasare (Clockwise sau Counterclockwise).
Întreruperea constă în verificarea umidității din cameră și pornirea diffuserului de apă când umiditatea este sub un anumit prag.
Rezultate Obţinute
Concluzii
Dupa ore de muncă, robotul își îndeplinește funcțiile de bază:
- evitarea obstacolelor
- umidificarea camerei
Ca experiență, mi s-a părut super interesant să fac propriul meu proiect (Hardware + Software), care să și funcționeze în final.
Am avut și mici momente de “panică”, când nu mai mergea un motor (i-am deschis carcasa, dar aparent problema era la conectarea unui fir ![]() ) sau când nu funcționa senzorul de umiditate așa cum mă așteptasem.
) sau când nu funcționa senzorul de umiditate așa cum mă așteptasem.
Download
Bibliografie/Resurse
