
This is an old revision of the document!
Robot care sorteaza cutii
Introducere
Proiectul consta intr-un robot care stie sa urmareasca o linie pe un traseu care are 4 capete:1 capat este destinat pentru primirea cutiei (voi avea 3 cutii de culori diferite) si 3 capete pentru depozitarea cutiilor. Robotul va urmarii un traseu ghidat de o linie cu scopul de a duce cutia in zona corespunzatoare ei (una dintre cele 3 capete). In functie de culoarea cutiei, la o rascruce el va sti in ce directie sa mearga pentru a duce cutia si pentu a o lasa acolo, revenind apoi in zona de colectare a cutiilor.
Descriere generală
Robotul se va deplasa pe 2 roti, avand o roata pivotanta pentru echilibru. El va fi pornit din capatul in care asteapta sa primeasca cutii, cu ajutorul unui switch. Dupa ce robotul primeste cutia, el se va intoarce cu 180 de grade si va urmari linia, folosind un modul pentru urmarirea liniei, pana cand ajunge la o intersectie. In acel moment, in functie de culoarea cutitei, el va decide pe ce cale o va lua pentru a ajunge in capatul potrivit. Cand va ajunge acolo, robotul se va folosi de un servomotor pentru a arunca cutia jos, dupa care el sa va intoarce in pozitia initiala, adica in capatul de unde colecteaza cutii.
Pe langa componente robotului, voi confectiona o 'arena' in care robotul se va deplasa si in care se vor afla cele 4 capete povestite anterior si cutiile care vor fi de trei culori diferite(rosu, verde si albastru).
Traseu robot

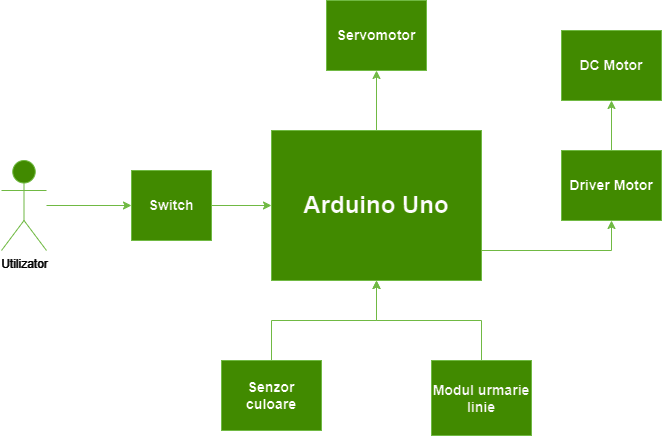
Hardware Design
Lista de piese:
- Arduino Uno
- Modul senzor de culoare TCS3200
- Modul pentru urmarirea liniei cu 5 senzori fotoelectrici reflectivi TCRT5000
- 2 motoare DC cu reductor 3-6V
- un servomotor SG90
- driver motor L298N
- acumulator 7V2 pentru driver
- baterie 9V pentru arduino
- switch

Software Design
- mediu de dezvoltare (if any) (e.g. AVR Studio, CodeVisionAVR)
- librării şi surse 3rd-party (e.g. Procyon AVRlib)
- algoritmi şi structuri pe care plănuiţi să le implementaţi
- (etapa 3) surse şi funcţii implementate
Rezultate Obţinute
Concluzii
Download
Fişierele se încarcă pe wiki folosind facilitatea Add Images or other files. Namespace-ul în care se încarcă fişierele este de tipul :pm:prj20??:c? sau :pm:prj20??:c?:nume_student (dacă este cazul). Exemplu: Dumitru Alin, 331CC → :pm:prj2009:cc:dumitru_alin.
Jurnal
- adaugat switch proiectului care va opri executia programului cand este pe ON (implementat cu intreruperi)
- schimbat schematicul pentru a adauga switch-ul si un modul nou de urmarie a liniei (acesta are senzorii mai apropiati)
- incercat driver + senzor de urmarire a liniei impreuna cu un PID controller pentru a testa functionalitatea pieselor si pentru a intelege cum functioneaza modulele.
- ajustat pozitie modul urmarire linie (pentru ca mi-a fost foarte greu sa il fac sa fie foarte aproape de podea, dar am observat ca daca inclin putin de modul, senzorii detecteaza mai de departe negru, dar are nevoie de o suprafata neagra mai mare)
- dublat grosime traseu de test si traseu final pentru a detecta mai bine linia neagra
- calibrat PID pentru a stabiliza robotul
Bibliografie/Resurse
