
This is an old revision of the document!
Articulație panou solar "Sunflower"
Introducere
Tranziția lumii către energie verde este un subiect de mare actualitate în ultima vreme, pentru a susține eforturile de a încetini și opri încălzirea globală. Modul în care doresc să contribui la acest efort este crearea unei metode de a îmbunătăți eficiența panourilor solare.
Din cauza costurilor mari ale unui panou solar (aproape 10.000 lei pentru a alimenta o gospodărie), un bun complementar care poate maximiza eficiența investiției este binevenit. Articulația propusă în cadrul acestui proiect va orienta automat panoul solar către soare, pentru a optimiza unghiul sub care razele soarelui cad pe acesta și pentru a maximiza producția de energie electrică. Modul de funcționare este inspirat de planta floarea soarelui și comportamentul articulației va fi aproape identic cu aceasta.
Pe lângă beneficiile ecologice ale unui asemenea sistem, articulația poate aduce și beneficii financiare cumpărătorului: creșterea producției de energie electrică a panoului fotovoltaic reduce semnificativ și costul facturilor la energie electrică. Astfel, dacă articulația are un cost de producție suficient de mic, ea poate deveni un bun indispensabil sistemelor fotoelectrice.
Descriere generală
Mai jos prezint schema bloc a sistemului propus pentru articulația solară:
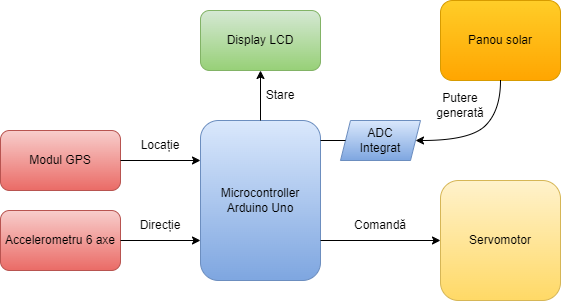
- Nucleul sistemului este un microcontroller Arduino Uno, care se va ocupa de orientarea panoului solar către soare. Voi explica mai jos cum realizează această operație.
- În partea stângă, în chenare roșii, se află cele două elemente care oferă microcontroller-ului date despre locația panoului solar: locația (coordonatele geografice) și poziția în spațiu. Folosindu-se de aceste două informații, precum și de ora curentă (stocată intern) microcontroller-ul poate calcula exact direcția către care trebuie orientat panoul solar.
- Orientarea panoului solar către direcția calculată se face prin intermediul unui servomoator care controlează unghiul azimutal (stânga-dreapta). Se poate adăuga și un al doilea servomotor pentru a controla altitudinea (sus-jos).
- În cadrul acestui prototip, panoul solar va fi conectat la convertorul analog-digital al microcontller-ului, pentru a putea calcula și afișa puterea generată de panou. Firește, trebuie introdus și un circuit de protecție, în cazul în care puterea generată de panou este suficient de mare pentru a deteriora pinii microcontroller-ului.
- Sistemul va avea atașat și un display LCD, pe care vor fi afișate diverse date despre starea sistemului, precum:
- Puterea generată de panou
- Data și ora
- Locația geografică
Hardware Design
Listă de piese necesare:
- 1x Microcontroller Arduino Uno
1x Modul Accelerometru 9 axe MPU9250- 1x Modul Accelerometru 6 axe MPU6500
- 1x Modul GPS NEO-6MV2
- 1x Display LCD
- 1x Motor pas cu pas 28BYJ-48
Schema electrică

După cum se poate observa, am conectat perifericele astfel:
- LCD-ul și accelerometrul MPU-6500 comunică prin I2C, astfel că i-am conectat la pinii SCL și SDA corespunzători de pe Arduino (A4, respectiv A5)
- Modulul GPS comunică prin serială (UART), astfel că l-am conectat la pinii TX și RX de pe plăcuță D3, respectiv D4
- Motorul pas cu pas are 4 pini IN1-4 pe care i-am conectat la pinii D8-11 de pe Arduino
- Toate componentele sunt alimentate de la pinii de 5V și GND ai plăcuței Arduino
- “Panoul solar” este conectat la unul dintre pinii analogici ai plăcuței (A0) pentru a putea folosi Convertorul Analog-Digital
Aspect fizic
În poza de mai jos se poate observa cum arată proiectul și fiecare componentă:

Software Design
Pentru dezvoltarea aplicației am folosit modulul PlatformIO integrat în aplicația Visual Studio Code.
Librăriile externe folosite sunt următoarele:
- InvensenseImu - pentru interfațarea cu accelerometrul cu 6 axe
- Liquid Crystal I2C - pentru intefațarea cu display-ul LCD
- AltSoftSerial - pentru comunicația cu modulul GPS
- TinyGpsPlus - pentru parsarea datelor de la modulul GPS, in format NMEA
- Unistep2 - pentru controlul asincron al motorului pas cu pas
- Time - pentru un ceas facil pe Arduino
Modul de funcționare
Înainte de a prezenta codul, este necesar să explic cum funcționează proiectul.
La pornire, acesta trece printr-o fază de inițializare în care modulul GPS caută semnal de la satelit. Conform datasheet, modulul GPS are nevoie de aproximativ 27s pentru a se conecta la sateliți, presupunând vedere clară a cerului. Căutarea semnalului durează maxim 90s, după care microcontroller-ul trece în faza următoare, știind locația și ora UTC. În cazul în care GPS-ul nu se poate conecta la satelit în cele 90s, este afișat un mesaj de eroare și se va folosi locația default a holului EC din Facultatea de Automatică și Calculatoare.
După ce se termină inițializarea, proiectul începe treaba efectivă de a stabiliza direcția panoului solar montat deasupra servomotorului. Pentru a face asta, se folosește de datele primite de la accelerometru, mai precis viteza unghiulară în jurul axei Oz (rotația stânga-dreapta a panoului). Având în vedere relația matematică dintre viteză și distanță, pot calcula unghiul cu care trebuie rotit panoul prin integrarea pulsației față de timp. La final, microcontroller-ul va comanda motorul pentru a roti panoul. În timp ce microcontroller-ul efectuează aceste operații, pe LCD vor fi afișate date despre tensiunea generată de panoul solar și ora locală.
Module de cod
Rezultate Obţinute
Concluzii
Download
Fişierele se încarcă pe wiki folosind facilitatea Add Images or other files. Namespace-ul în care se încarcă fişierele este de tipul :pm:prj20??:c? sau :pm:prj20??:c?:nume_student (dacă este cazul). Exemplu: Dumitru Alin, 331CC → :pm:prj2009:cc:dumitru_alin.
Jurnal
- 4 mai 2024: Definitivarea temei proiectului și inițializarea paginii de wiki
- 20 mai 2024: Realizat schema electrică
Bibliografie/Resurse
