
Ușă glisantă cu senzor de proximitate
Student: Necula Andreea
Grupa: 336CB
Introducere
Descriere generală
Schema bloc:

Componente folosite
- Placă de dezvoltare compatibilă cu Arduino UNO (ATmega328p) ➢ Aceasta conține codul și trimite semnale către toate celelalte componente. Este alimentat la o tensiune de 9V.
- Breadboard ➢ Prin breadboard alimentăm senzorul PIR, driver-ul de motoare și senzorul fotoelectric și se realizează conexiunile între componente.
- Micro motor cu reductor (240 rpm, cuplu = 0.2 kg*cm) ➢ Elementul de acționare. El acționează ușa în direcția corespunzătoare. Este alimentat cu ajutorul driver-ului.
- Driver de motoare ➢ Alimentează motorul, previne suprasolicitarea plăcii Arduino și controlează direcția motorului. Se alimentează la 9V (la borna denumită 12V) și are o cădere de tensiune de ~2V, deci îi va furniza motorului aproximativ 7V. Borna denumită 5V furnizează o tensiune de 5V.
- Senzor PIR ➢ Realizează achiziția de date. Este alimentat la 9V.
- Senzor fotoelectric ➢ Detectează când ușa este închisă complet deschisă. Este alimentat la 5V.
- Un led verde și un led roșu ➢ Indică dacă ușa este în curs de deschidere, respectiv închidere.
- Alimentator de 9V (pentru Arduino) ➢ alimentează placa Arduino si breadboard-ul.
- Rezistențe ➢ limitează curentul prin diode
- Fire breadboard
- Cablu USB pentru alimentarea plăcii Arduino
- Cremalieră pentru ușă
- Rotiță pentru motor
- Carton pentru construcția suportului și a ușii
Schema electrica

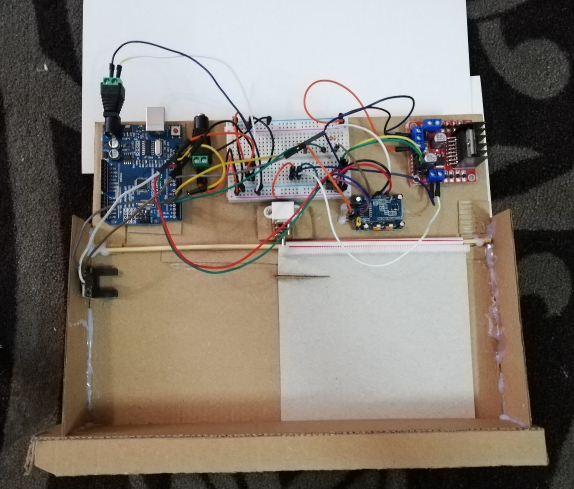
Hardware Design
Usa se deschide
Usa se inchide
Software Design
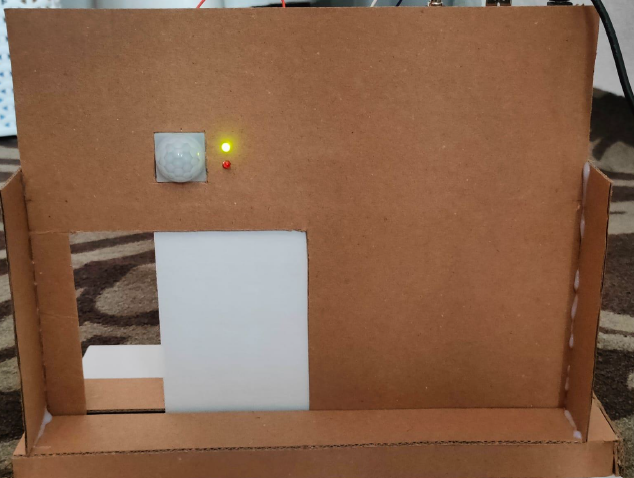
![]() În momentul în care senzorul de proximitate detectează mișcare, acesta transimte semnalul plăcuței Arduino, care, prin intermediul driver-ului, pornește motorul pentru a deschide ușa. În același timp, led-ul verde se aprinde, iar ușa se deschide până în momentul în care senzorul fotoelectric detectează prezența unui limitator lipit de ușă. Acest lucru reprezintă deschiderea completă a ușii.
În momentul în care senzorul de proximitate detectează mișcare, acesta transimte semnalul plăcuței Arduino, care, prin intermediul driver-ului, pornește motorul pentru a deschide ușa. În același timp, led-ul verde se aprinde, iar ușa se deschide până în momentul în care senzorul fotoelectric detectează prezența unui limitator lipit de ușă. Acest lucru reprezintă deschiderea completă a ușii.
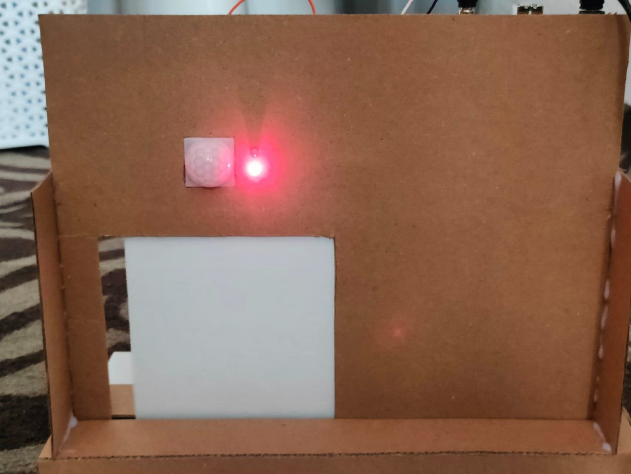
![]() Usa rămâne deschisă cel puțin 3 secunde sau cât timp senzorul de proximitate detectează mișcare. În momentul în care senzorul nu mai detectează mișcare, ușa începe să se închidă, led-ul verde se va stinge, iar led-ul roșu se va aprinde.
Usa rămâne deschisă cel puțin 3 secunde sau cât timp senzorul de proximitate detectează mișcare. În momentul în care senzorul nu mai detectează mișcare, ușa începe să se închidă, led-ul verde se va stinge, iar led-ul roșu se va aprinde.
![]() Dacă senzorul PIR detectează mișcare în timp ce ușa este în curs de închidere, atunci plăcuța Arduino va trimite semnal către driver să schimbe sensul de rotație al rotorului motorului. În același timp, led-ul roșu se va stinge, iar led-ul verde se va aprinde. În schimb, dacă senzorul PIR nu mai detectează mișcare ușa se va închide complet, iar led-ul roșu se va stinge.
Dacă senzorul PIR detectează mișcare în timp ce ușa este în curs de închidere, atunci plăcuța Arduino va trimite semnal către driver să schimbe sensul de rotație al rotorului motorului. În același timp, led-ul roșu se va stinge, iar led-ul verde se va aprinde. În schimb, dacă senzorul PIR nu mai detectează mișcare ușa se va închide complet, iar led-ul roșu se va stinge.
//Cat timp senzor-ul fotoelectric nu detecteaza cremaliera,
//Motorul deschide usa
while(digitalRead(pin) == LOW) {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
analogWrite(GREEN_LED, 255);
analogWrite(RED_LED, 0);
}
//Dupa ce usa este deschisa complet, respectiv senzorul fotoelectric
//detecteaza cremaliera, motorul se va opri timp de 2 secunde,
//pentru a permite trecerea
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
analogWrite(GREEN_LED, 255);
analogWrite(RED_LED, 0);
delay(3000);
analogWrite(GREEN_LED, 0);
analogWrite(RED_LED, 255);
//Daca senzorul de miscare nu detecteaza nimic si daca senzorul
//fotoelectric detecteaza prezenta cremalierei (usa complet deschisa)
//atunci usa se va inchide
if(digitalRead(pin) == HIGH) {
//Se porneste timer-ul, iar usa se inchide
time_t = millis();
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
Serial.print(millis() - time_t);
Serial.print("\n");
} else {
if(millis() - time_t >= 8200) {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
analogWrite(GREEN_LED, 0);
analogWrite(RED_LED, 0);
}
}
Testarea solutiei
În prima etapă am testat componentele separat înainte de începerea asamblării pentru a vedea dacă și cum functionează, în special motorul, driver-ul pentru motor si plăcuța Arduino. Am alimentat motorul prin driver pentru a le testa și pentru plăcuța Arduino am scris un cod mic în care foloseam senzorul PIR.
Download
Jurnal
- 26 aprilie - proiect ales
- 3 mai - relizarea documentației
- 5 mai - research piese
- 8 mai - comandarea pieselor
- 12 mai - hardware start
- 19 mai - hardware stop
- 20 mai - software start
- 21 mai - software stop
- 29 mai - wikiii :)
Bibliografie/Resurse
