
This is an old revision of the document!
Alarma Distanta
Introducere
Proiectul consta intr-un senzor care determina daca un obiect este prea aproape si alerteaza utilizatorul printr-un LED / semnal audio.
Descriere generală
Senzorul va detecta apropierea unui obiect, in functie de distanta LED-ul va lumina in mod diferit, iar in cazul unei distante ce depaseste o anumita limita se va activa un sunet de alarma.

Hardware Design
Lista Componente:
- Arduino UNO
- Ultrasonic sensor
- Micro SD card adapter Module
- Card SD 32GB
- Speaker
- LED
- Rezistente
- Tranzistor

Software Design
- mediu de dezvoltare (if any) (e.g. AVR Studio, CodeVisionAVR)
- librării şi surse 3rd-party (e.g. Procyon AVRlib)
- algoritmi şi structuri pe care plănuiţi să le implementaţi
- (etapa 3) surse şi funcţii implementate
Mediu de dezvoltare: ArduinoIDE
Pentru redarea audio pe difuzor din cardul SD am folosit libraria SimpleSDAudio (https://www.hackerspace-ffm.de/wiki/index.php?title=SimpleSDAudio)
Exista restrictii asupra fisierului audio:
- bit resolution: 8 Bit
- sampling rate: 32000 Hz
- audio channel: stereo
Cardul SD trebuie sa fie de 8 / 16 / 32 GB si formatat FAT16 / FAT32. Nu exista suport pentru cardurile de 64 GB.
Calculul distantei in cm
Distanta pe care o parcurge unda de la trigPin la echoPin este dublul distantei intre senzor si obiectul detectat.
Outputul obtinut de la senzor este timpul in microsecunde in care unda a calatorit.
Viteza sunetului este de 340 m/s = 0.034 cm/µs.
Folosind d = v * t obtinem formula: D = T * 0.034 / 2 (cm).
Update
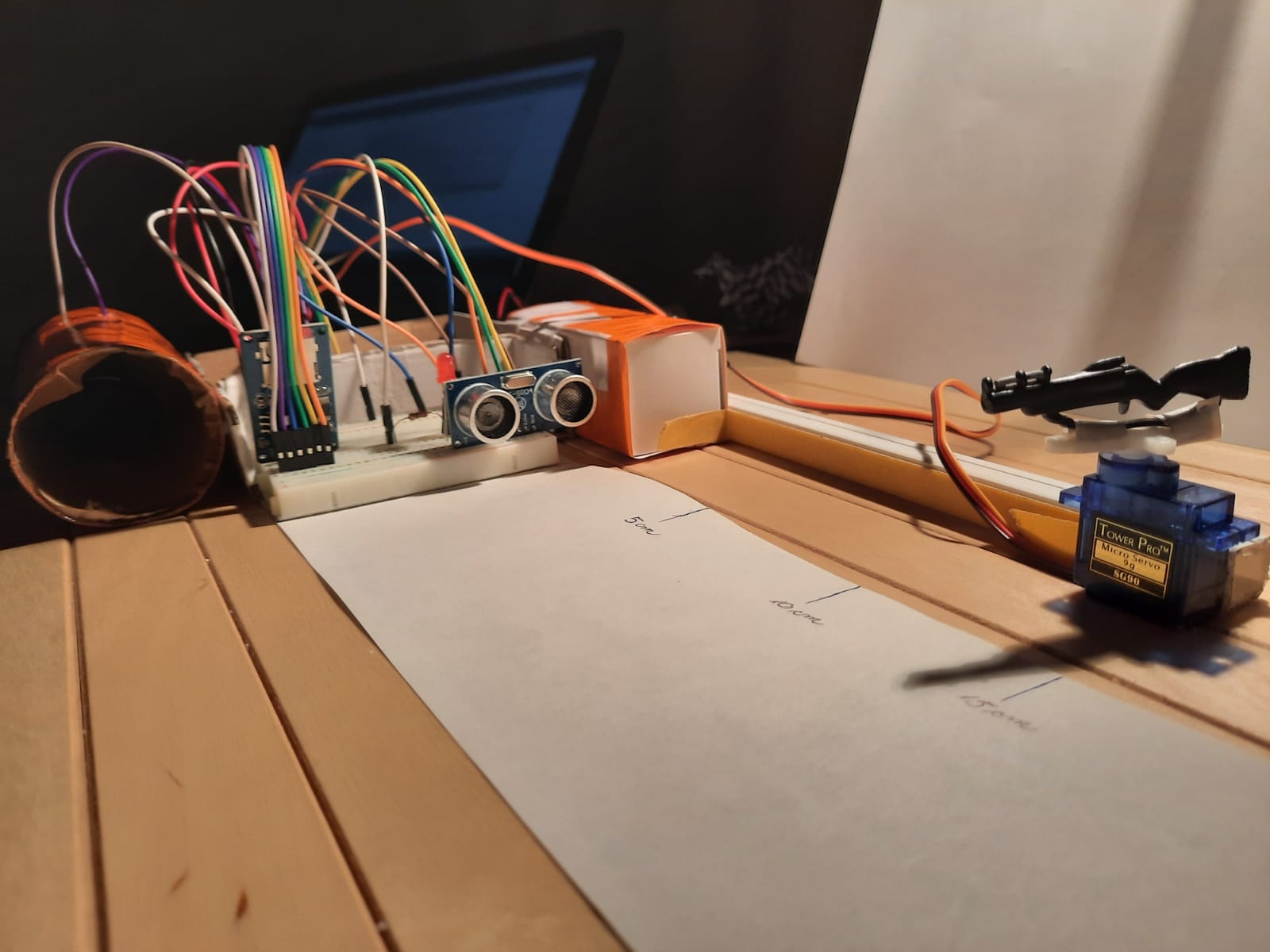
Am adaugat un servomotor care sa tinteasca obstacolul. Alarma este activata pe o distanta de 20 cm ⇒ arma are cate o pozitie pentru fiecare din intervalele [0, 5] (5, 10] (10, 15] (15, 20+].
Servomotorul asteapta un impuls la fiecare 20ms; Rotesc cu cate o pozitie (aprox 30 grade) arma din pozitia initiala pentru a o incadra in zona marcata. Pozitia initiala a armei trebuie sa fie la 30 grade, orientata in intervalul [0, 5].
Rezultate Obţinute
Update
Final Look
{{:pm:prj2022:amocanu:arduino1.jpg?direct&200|}} {{:pm:prj2022:amocanu:arduino2.jpg?direct&200|}} {{:pm:prj2022:amocanu:arduino3.jpg?direct&200|}}
Concluzii
Am aplicat cu succes conceptele si aplicatiile practice invatate in laborator si am invatat tehnici de debug atunci cand unele componente nu functioneaza corect, ceea ce include revizuirea legaturilor hardware / modul de functionare al codului. Aparatul functioneaza corect conform modului in care a fost conceput.
Download
Bibliografie/Resurse
