
This is an old revision of the document!
Senzor de parcare
Autor
Introducere
Proiectul presupune implementarea unui senzor de distanță. Senzorul detectează obstacolele și anunță șoferul prin led-uri, sunet(buzzer) și afișează pe ecran distanța. Pe telefon va apărea un mesaj de atenționare câți metri sunt până la obstacol.
Descriere generală
Proiectul are ca functionalitate de baza de a detecta obstacole. In functie de cat de aproape se afla obstacolul cu atat mai tare o sa fie scos un sunet de buzzer. Pentru a detecta obstacolele se va folosi senzor ultrasonic si pe un ecran LCD se va afisa la ce distanta se afla obstacolul. Din moment ce obstacolul va fi detectat va aparea pe telefon notificare. Senzorul de parcare are la baza 3 culori in functie de distanta obstacolului(rosu(foarte aproape), galben(mediu), alb(departe)).
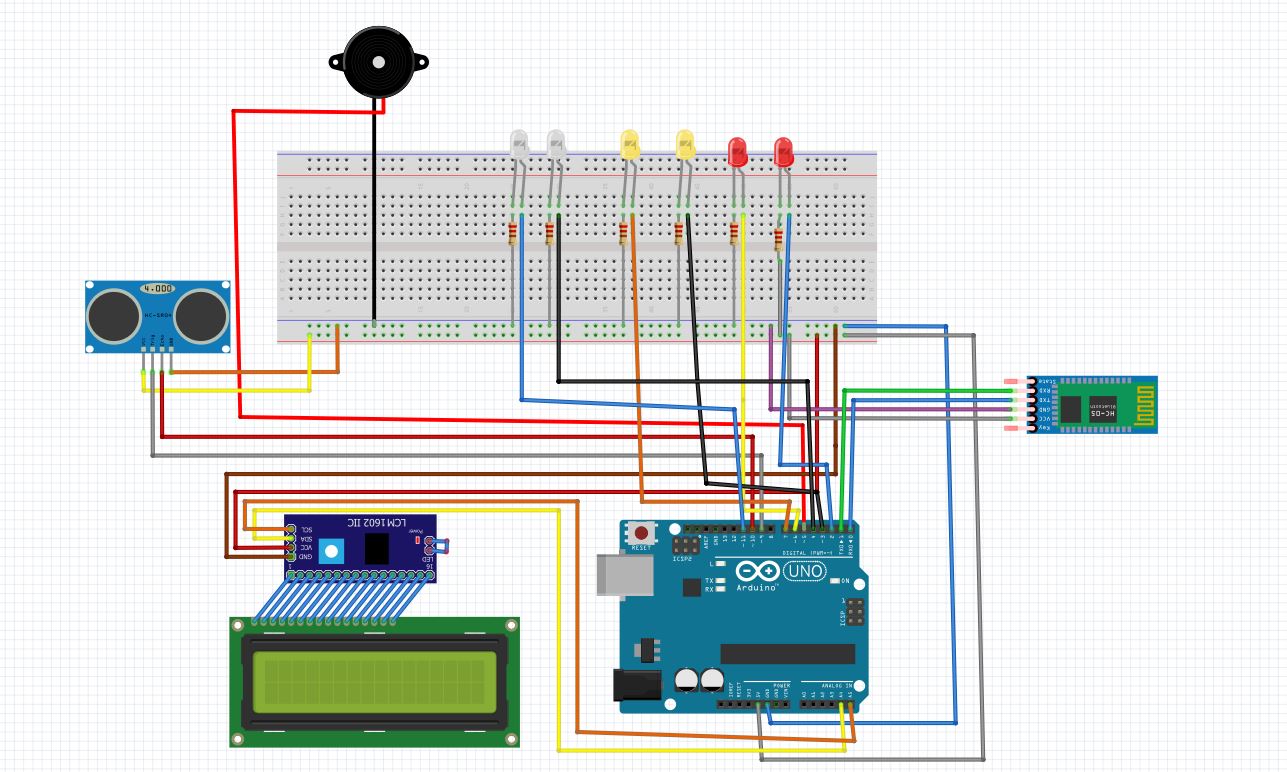
Schema Bloc

Hardware Design
Lista piese:
- Arduino UNO
- Breadboard
- Fire
- Buzzer
- LCD
- Led-uri
- Rezistente
- Senzorul Ultrasonic HC-SR04
- Modul bluetooth
Schema electrica:
Software Design
Mediu de dezvoltare
Arduino IDE
Biblioteci folosite
- Wire.h : Utilizata pentru comunicare cu I2C
- LiquidCrystal_I2C.h : Utilizata pentru comunicare cu LCD
Detalii implementare
- In setup sunt configurati pinii de output si input si initializarea interfetei pentru LCD.
- In functia loop Setez pinul Trig pe HIGH timp de 10 microdsecunde pentru a genera ultrasunete. Cu ajutorul pinului Echo calculez lungimea undei sonore in microsecunde ca dupa sa calculez distanta de la senzor pana la obstacol in cm conform formulei( d = durata in microsecunde * viteza sunetului / 2). In functie de distanta se aprind led-urile corespunzatoare si buzzer-ul emite sunete care atentioneaza soferul ca este prea aproape de un obstacol. Pentru a emite sunete folosesc functia tone. Distanta este afisata pe LCD.
- De asemenea putem sa ne conectam cu modulul bluetooth la telefon, pentru aceasta am implementat functia bluetooth unde in functie de ce buton a fost apasat se va aprinde/stinge led-uri, porni/opri buzzer-ul. Se va citi de pe seriala valoarea fiecarui buton.
Rezultate obtinute
Demo
Concluzii
Download
Jurnal
Bibliografie/Resurse
