
Distance Measurement
Introducere
Dispozitiv care masoara distanta folosind senzor de ultrasunete.
- ce face - masoara distanta precis
- care este scopul lui - poate fi folosit la masurarea adancimii apei; mai poate fi folosit la masinute de jucarie pentru a localiza obstacolele
- care a fost ideea de la care aţi pornit
- de ce credeţi că este util pentru alţii şi pentru voi
Descriere generală
Senzorul emite ultrasunete, iar in momentul in care undele transmise intalnesc un obstacol, ele sunt transmise inapoi la senzor, folosind o tehnica numita ECHO. Trebuie calculat timpul de propagare al sunetelor, de la sursa la obstacol si inapoi.
Distanta se calculeaza cu ajutorul vitezei sunetului.(Distanta = Timp / Viteza sunetului)
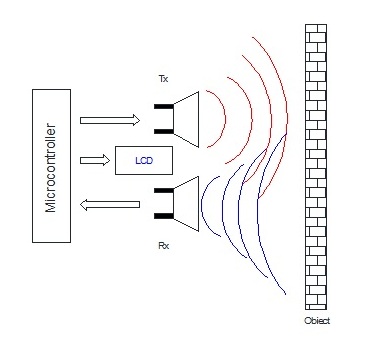
Senzorul ultrasonic HC-SR04 poate masura distante intre 2cm si 400cm cu precizie care poate ajunge la 3mm. Fiecare modul include un transmitator ultrasonic, un receptor si un circuit de comanda. Pentru functionare senzorul are nevoie de 4 pini VCC(Power), Trig(Trigger), Echo(Primire) si GND.
Caracteristici senzor:
- -tensiune de operare: DC 5V
- -curentul de functionare: 15 mA
- -unghi de functionare: 15 grade
Principiul de functionare:
- 1.Un semnal High este trimis pentru 10us, folosind Trigger.
- 2.Modulul trimite 8 semnale automat de 40kHz, si dupa verifica daca semnalul este receptionat sau nu.
- 3.Daca semnalul este receptionat, atunci este prin nivelul High. Timpul cat dureaza High este reprezentat de decalajul de timp dintre trimiterea si receptionarea semnalului.
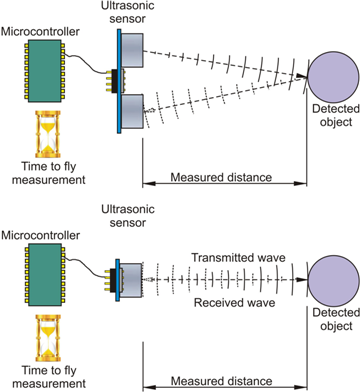
Diagrama de timp - senzor HC-SR04
- Senzorul furnizeaza un semnal de output proportional cu distanta masurata pe baza ecoului.Senzorul genereaza un sunet (Trigger) si dupa asteapta receptia undelor. Viteza sunetului este 220 m/s, iar timpul necesar ecoului pentru a ajunge la sursa furnizeaza un semnal de output proportional cu distanta.
- La inceput este necesara initierea senzorului pentru a masura distanta, un semnal logic High, la pinul Trigger al senzorului pentru mai mult de 10uS, dupa aceea un sunet este transmis de senzor, dupa un ecou, senzorul furnizeaza un semnal la pinul de iesire ale carei latimi este proportionala cu distanta dintre sursa si obstacol.
- Distanta se calculeaza ca, distanta(cm)= latimea semnalului de iesire(in uS)/58.
- Latimea semnalului poate fi luata ca multiplu de uS (micro secunde sau 10^-6)

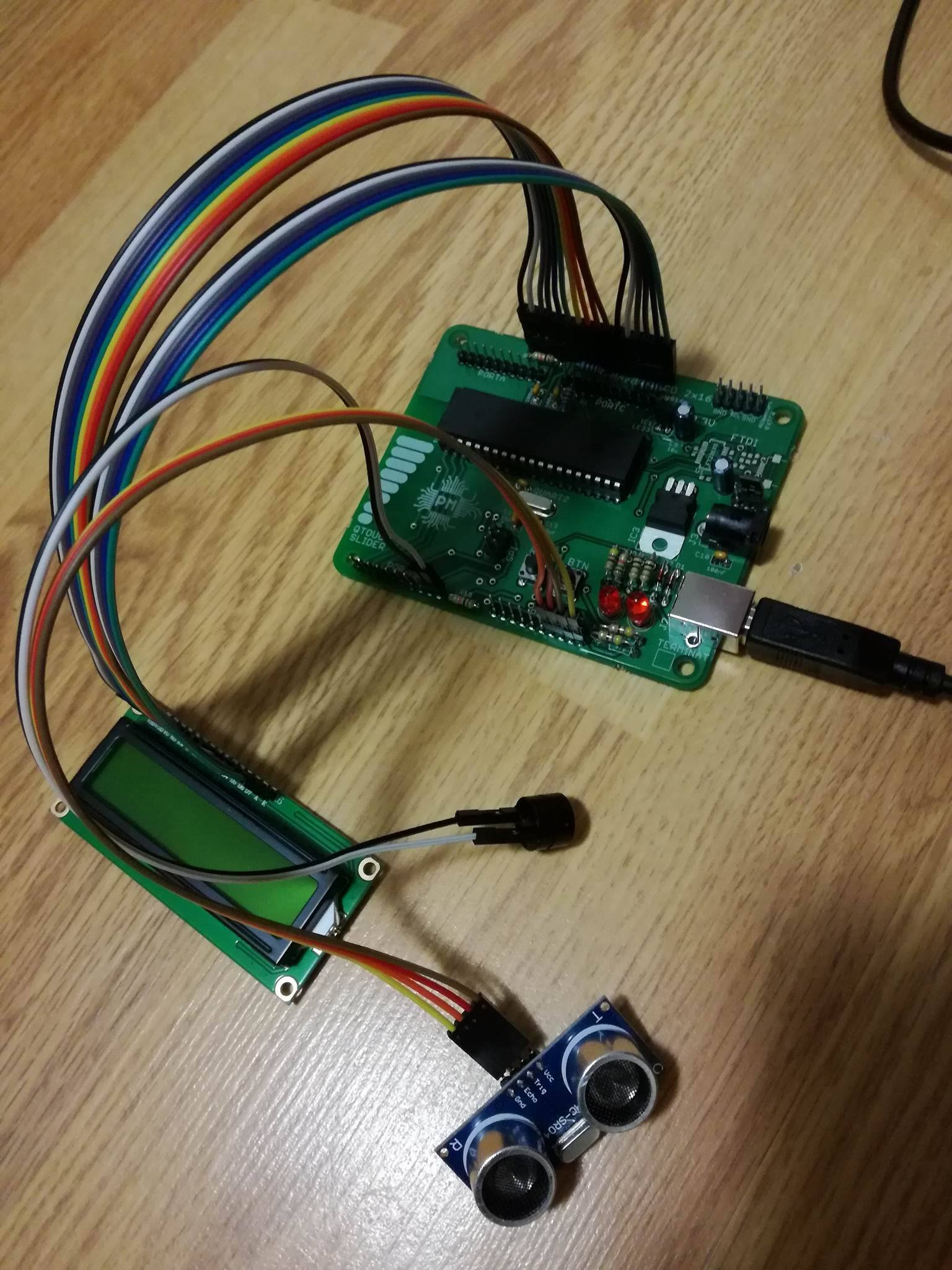
Hardware Design
- listă de piese :
- placa de baza PM
- ATMEGA324
- sezor ultrasonic HC-SR04
- LCD 16×2
- rezistente
- condensatori
- cablu USB 2.0 imprimanta
- butoane
- buzzer
- LED-uri

Pini senzor:
Vcc: +5VDC
Trig:Trigger(INPUT)
Echo:Echo(OUTPUT)
GND: GND
- scheme electrice

*

- Semnalul in sectiunea receiver-ului

Rezultatele simulării
- Microcontroller-ul asteapta primirea impulsurilor pentru o durata maxima de 12 milisecunde. Acesta este timpul necesar undelor ultrasonice pentru a parcuge distanta maxima de 4 metri. Daca nu primeste impulsul in acest interval de timp se considera ca nu exista niciun obstacol sau ca obiectul este inafara razei.
- Odata ce impulsurile au fost primite, microcontroller-ul numara 10 impulsuri in intervale de timp de 25 microsecunde, doar atunci masuratoarea este considerata valida.
Software Design
--lcd.c--
#include "lcd.h"
// Initializare LCD considerand o interfatare cu 4 pini de date.
// Trebuie apelata inainte de a face orice operatie cu LCD-ul.
void LCD_init(void)
{
// setam pinii de date ca pini de iesire
LcdDATA_DDR |= LCD_DATA_MASK;
// setam pinii de comenzi ca pini de iesire
LcdCTRL_DDR |= LCD_CTRL_MASK;
// intram in modul comenzi: RS - low, RW - low
LCD_RS_LOW();
LCD_RW_LOW();
// asteptam timpul de set-up pentru RS si RW
LCD_DELAY();
// initializarea pentru 4 fire de date necesita transferarea lui 0100 -> D4-D7
// E pe high incepe transferul
LCD_ENABLE();
// scriem cei mai semnificativi 4 biti pe firele de date, fara a modifica alti biti
LcdDATA_PORT = (LcdDATA_PORT & ~LCD_DATA_MASK) |
(0 << LcdD7) |
(0 << LcdD6) |
(1 << LcdD5) |
(0 << LcdD4);
// asteptam timpul minim de set-up
LCD_DELAY();
// E pe low termina transferul
LCD_DISABLE();
// asteptam timpul minim pana la urmatorul E (contine timpul de hold)
LCD_DELAY();
// transmitem configuratia initiala
// 4 biti de date, 2 linii, font 8x5
LCD_writeInstr(LCD_INSTR_4wire);
// display pornit, cursor afisat, blink activat
LCD_writeInstr(LCD_INSTR_displayConfig);
// auto-increment, fara shiftare
LCD_writeInstr(LCD_INSTR_incNoShift);
// sterge display
LCD_writeInstr(LCD_INSTR_clearDisplay);
}
// Executa secventa de citire a unui octet de date de la LCD.
// Pentru interfatarea cu 4 pini de date sunt necesare 2 transferuri.
uint8_t LCD_read(void)
{
// setam pinii de date ca intrari pentru a putea primit date de la LCD
LcdDATA_DDR &= ~LCD_DATA_MASK;
// dezactivam rezistentele de pull-up pentru pinii de date
LcdDATA_PORT &= ~LCD_DATA_MASK;
// stocheaza valoarea care va fi citita
uint8_t data = 0;
// transferul primilor 4 biti de la LCD
LCD_ENABLE();
// asteptam timpul minim de set-up
LCD_DELAY();
// citim de pe pinii de date cei mai semnificativi 4 biti
data |= (((LcdDATA_PIN >> LcdD7) & 0x01) << 7) |
(((LcdDATA_PIN >> LcdD6) & 0x01) << 6) |
(((LcdDATA_PIN >> LcdD5) & 0x01) << 5) |
(((LcdDATA_PIN >> LcdD4) & 0x01) << 4);
LCD_DISABLE();
// asteptam timpul minim pana la urmatorul E
LCD_DELAY();
// transferul ultimilor 4 biti de la LCD
LCD_ENABLE();
// asteptam timpul minim de set-up
LCD_DELAY();
// citim de pe pinii de date cei mai putin semnificativi 4 biti
data |= (((LcdDATA_PIN >> LcdD7) & 0x01) << 3) |
(((LcdDATA_PIN >> LcdD6) & 0x01) << 2) |
(((LcdDATA_PIN >> LcdD5) & 0x01) << 1) |
(((LcdDATA_PIN >> LcdD4) & 0x01) << 0);
LCD_DISABLE();
// asteptam timpul minim pana la urmatorul E
LCD_DELAY();
// setam pinii de date inapoi ca iesiri
LcdDATA_DDR |= LCD_DATA_MASK;
// returnam octetul citit
return data;
}
// Citeste starea LCD-ului (contine busy flag).
uint8_t LCD_readStatus(void)
{
// intram in modul citire stare (busy flag + addresa curenta)
LCD_RS_LOW();
LCD_RW_HIGH();
// asteptam timpul de set-up pentru RS si RW
LCD_DELAY();
// citim si returnam datele
return LCD_read();
}
// Citeste un octet din ultima memorie folosita (DDRAM sau CGRAM).
uint8_t LCD_readData(void)
{
// intram in modul citire memorie
LCD_RS_HIGH();
LCD_RW_HIGH();
// asteptam timpul de set-up pentru RS si RW
LCD_DELAY();
// citim si returnam datele
return LCD_read();
}
// Returneaza starea LCD-ului: 1 - busy, 0 - available
uint8_t LCD_isBusy(void)
{
// busy flag este bitul 7: 1 -> busy, 0 -> available
return (LCD_readStatus() & (1 << 7)) != 0;
}
// Asteapta pana cand LCD-ul devine disponibil pentru o noua comanda.
void LCD_waitNotBusy(void)
{
while(LCD_isBusy());
}
// Executa secventa de trimitere a unui octet de date catre LCD.
// Pentru interfatarea cu 4 pini de date sunt necesare 2 transferuri.
void LCD_write(uint8_t data)
{
// transferul primilor 4 biti catre LCD
LCD_ENABLE();
// scriem pe pinii de date cei mai semnificativi 4 biti, fara a modifica alti biti in registru
LcdDATA_PORT = (LcdDATA_PORT & ~LCD_DATA_MASK) |
(((data >> 7) & 0x01) << LcdD7) |
(((data >> 6) & 0x01) << LcdD6) |
(((data >> 5) & 0x01) << LcdD5) |
(((data >> 4) & 0x01) << LcdD4);
// asteptam timpul minim de set-up
LCD_DELAY();
LCD_DISABLE();
// asteptam timpul minim pana la urmatorul E (contine timpul de hold)
LCD_DELAY();
// transferul ultimilor 4 biti catre LCD
LCD_ENABLE();
// scriem pe pinii de date cei mai putin semnificativi 4 biti, fara a modifica alti biti in registru
LcdDATA_PORT = (LcdDATA_PORT & ~LCD_DATA_MASK) |
(((data >> 3) & 0x01) << LcdD7) |
(((data >> 2) & 0x01) << LcdD6) |
(((data >> 1) & 0x01) << LcdD5) |
(((data >> 0) & 0x01) << LcdD4);
// asteptam timpul minim de set-up
LCD_DELAY();
LCD_DISABLE();
// asteptam timpul minim pana la urmatorul E (contine timpul de hold)
LCD_DELAY();
}
// Trimite o instructiune de control catre LCD.
void LCD_writeInstr(uint8_t instr)
{
// asteptam ca LCD-ul sa poata accepta instructiuni
LCD_waitNotBusy();
// intram in modul comenzi: RS - low, RW - low
LCD_RS_LOW();
LCD_RW_LOW();
// asteptam timpul de set-up pentru RS si RW
LCD_DELAY();
// trimitem datele
LCD_write(instr);
}
// Trimite o instructiune de scriere date catre LCD.
void LCD_writeData(uint8_t data)
{
// asteptam ca LCD-ul sa poata accepta instructiuni
LCD_waitNotBusy();
// intram in modul scriere date
LCD_RS_HIGH();
LCD_RW_LOW();
// asteptam timpul de set-up pentru RS si RW
LCD_DELAY();
// trimitem datele
LCD_write(data);
}
// Afiseaza caracterul pe LCD la adresa curenta.
void LCD_putChar(char c)
{
LCD_writeData(c);
}
// Afiseaza caracterul pe LCD la adresa primita.
void LCD_putCharAt(uint8_t addr, char c)
{
/* TODO task 1 LCD */
LCD_writeInstr(LCD_INSTR_DDRAM + addr);
LCD_putChar(c);
}
// Afiseaza string-ul pe LCD incepand de la adresa curenta.
void LCD_print(const char* msg)
{
while(*msg)
LCD_putChar(*msg++);
}
// Afiseaza string-ul pe LCD incepand de la adresa primita.
void LCD_printAt(uint8_t addr, const char* msg)
{
/* TODO task 1 LCD */
LCD_writeInstr(LCD_INSTR_DDRAM | addr);
LCD_print(msg);
}
--main.c--
#include <avr/io.h>
#include <avr/interrupt.h>
#define F_CPU 16000000L
#include <util/delay.h>
#include <stdlib.h>
static volatile int pulse = 0;
static volatile int i = 0;
ISR(INT2_vect)
{
if (i==1)
{
TCCR1B=0;
pulse=TCNT1;
TCNT1=0;
i=0;
}
if (i==0)
{
TCCR1B|=(1<<CS10);
i=1;
}
}
int main(void)
{
LCD_init();
DDRD |= _BV(PD0);
PORTD &= ~_BV(PD0);
TCCR1A = 0;
int16_t COUNTA = 0;
char SHOWA [16];
EICRA |= _BV(ISC20);
EIMSK |= _BV(INT2);
char temp[20];
/* Replace with your application code */
while (1)
{
PORTD |= _BV(PD0);
_delay_us(15);
PORTD &= ~_BV(PD0);
COUNTA = pulse / 58;
LCD_printAt(0, "Distanta:");
sprintf(SHOWA, "%d", COUNTA);
LCD_printAt(0x20, SHOWA);
}
}
Rezultate Obţinute
Dispozitivul poate masura corect pana la 4m
Concluzii
Download
Codul pentru proiect se afla aici : distancemeasurement.zip
Jurnal
Bibliografie/Resurse
- Documentația în format PDF
