
Ştefan-Alexandru ALDOIU (25316) - Red Line Follower
Autorul poate fi contactat la adresa: Login pentru adresa
Introducere
Acesta va putea vira staga-dreapta pentru a ramane pe traiectoria descrisa de linie, cu ajutorul unei bare de sezori care determina pozitia robotului in raport cu linia si comanda astfel turatia proportionata pe motoare.
Scopul proiectului este de a implementa o functinalitate cat mai buna a robotului pentru o eventuala participare la o competitie adecvata.
Intentionez(nu intra in task-urile proiectului) ca in cazul terminari mai din timp a proiectului sa fac un upgrade care sa permita remote control( ca in viitor sa imi permita testarea adaugarii unor encodere pentru retinerea traseului).
Descriere generală

Hardware Design
- 7805CT –regulator tensiune → 2 buc = 5.8 lei Farnell
- CONECT JACK 2089 → 2 buc = 6.3 lei Farnell
- Condensator 100nF → 10 buc = 4.4 lei Farnell
- Condensator 10uF → 10 buc = 1.9 lei Farnell
Componentele de mai sus sunt cele indicate din pagina componentelor. Materiale ajutatoare construirii robotoului:
- sasiui robot KRB-05 531 →1 buc = 34 lei Robofun
- suport motoare MCN-SAS-05 →1 buc = 23 lei Robofun
- ballcaster MCN-RS-02 →1 buc = 11 lei Robofun
- roti 32x7mm →1 buc = 28 lei Robofun
- motor micrometal cu reductor 30:1 MCN-MOT-34 643 →2 buc = 178 lei Robofun
(POLOLU 30:1 Micro Metal Gearmotor HP with Extended Motor Shaft)
- bara de senzori analogici QTR-8A →1 buc = 53 lei Robofun
- diode protectie current inductie 3A 1N5820 →15 buc = 23 lei Farnell
- driver motor L298N →1 buc = 30 lei Farnell
- Acumulator LiPo Turnigy 11.1V 1000 mAh 20C →1 buc = 70 lei OptimusDigital
(0104110000011909)
- Set Fire pentru Breadboard (0104110000001535) →1 buc = 11 lei OptimusDigital
- LED RGB cu Catod Comun (0104210000002096) →10 buc = 10 lei Optimus Digital
Scheme hardware in Eagle:
1.Schema de suport driver motor L298N
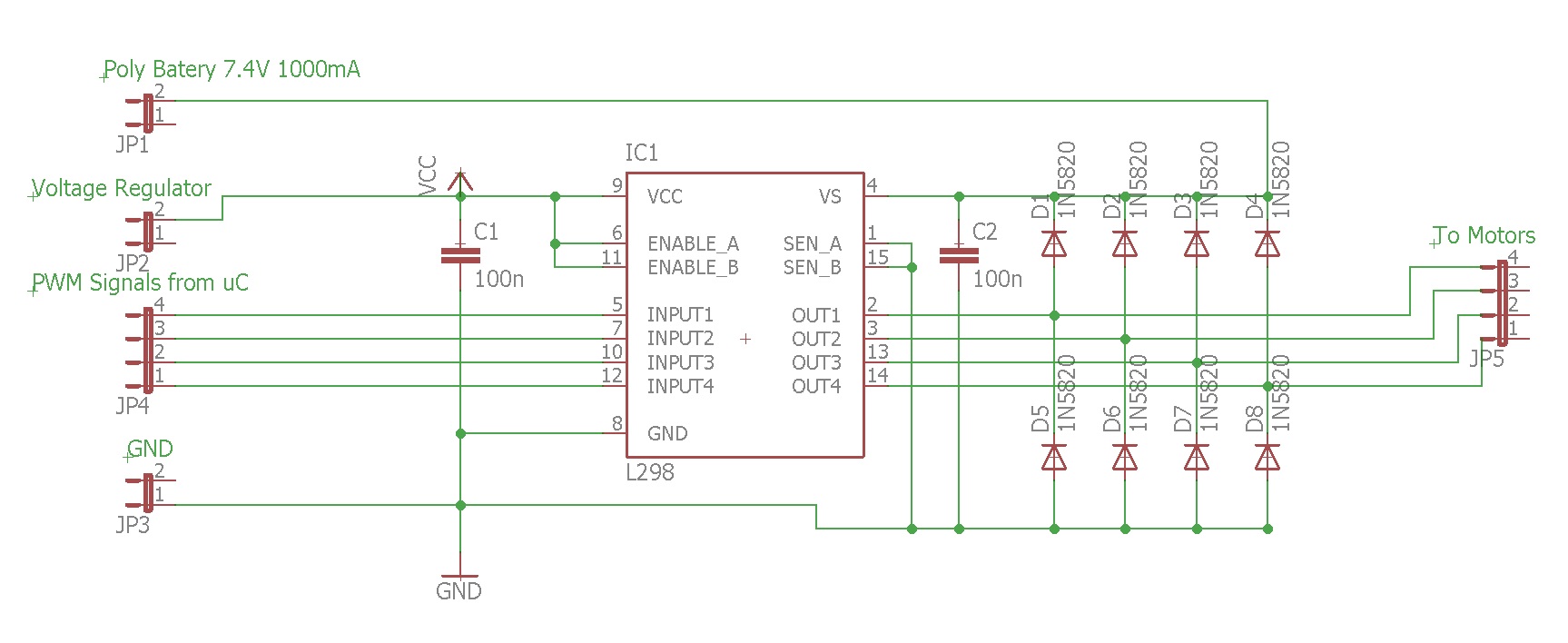
2.Schema legatura L298N-Atmega

Software Design
1.Se preia date in continuu(while(1)) de la senzorii de linie. Se preiau date asa,deoarece implementarea de intreruperi la detectarea liniei ar impune un delay semnificativ, astfel am adoptat busy-waiting.
2.In functie de pozitia indicata de senzori se comanda tensiune pararel pe motoare prin pwm(prin OC1A-PD5 si OC1B-PD4) pentru a vira stanga,dreapta mai brutal sau mai lin(in functie de euristici obtinute in scop experimental) pentru a pastra linia,urmand ca in linie dreapta,la stabilizare motoarele sa primesca tensiune maxima de alimentare(sa merga la turatie maxima).
Rezultate Obţinute
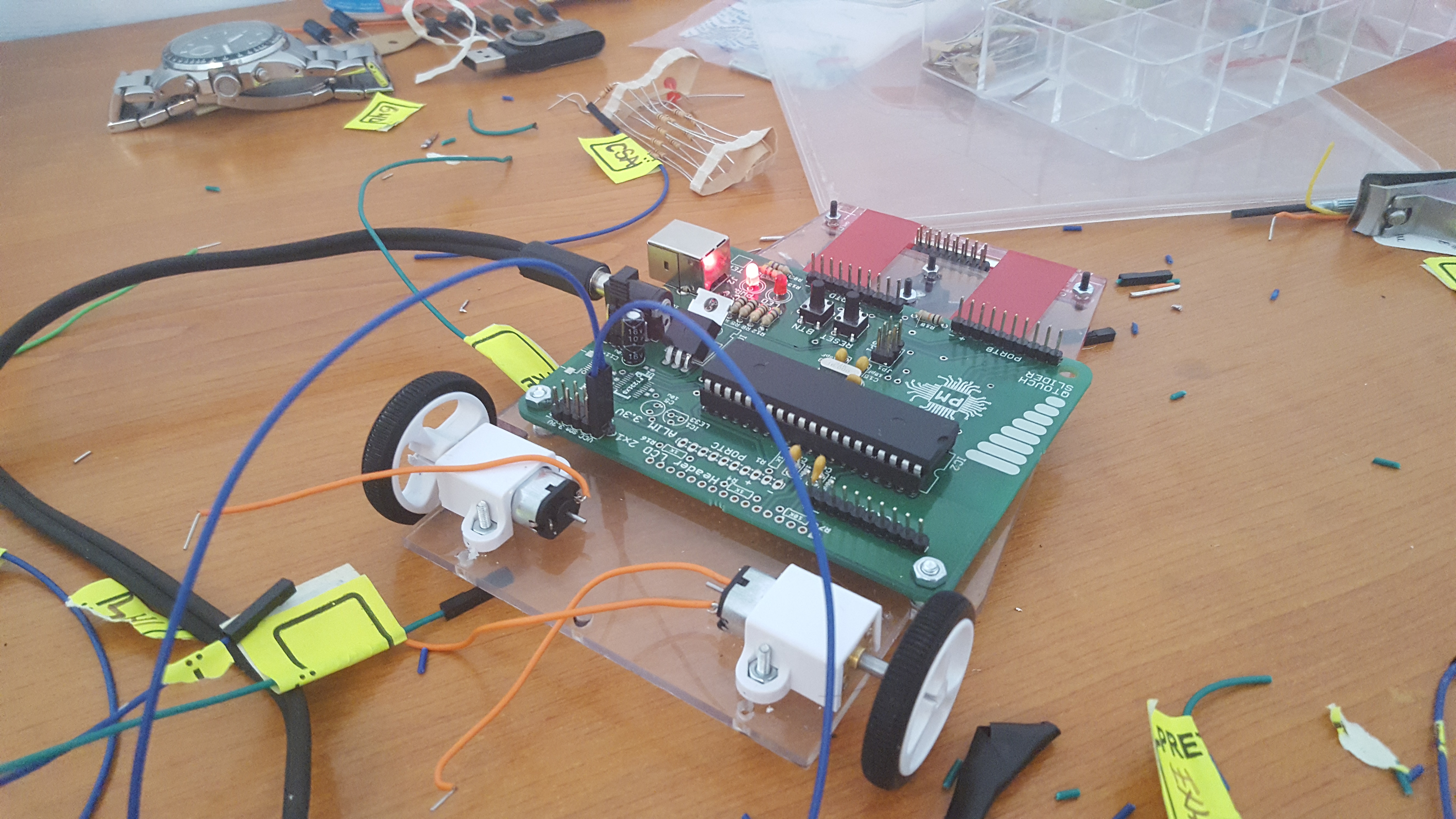
1. Initial am construit sasiul si am fixat placa de baza (placa de baza la care am lipit modulele aditionale de alimentare 12v) Totodata aici am fixat motoarele pololu 10:1 si placa de senzori QTR8A
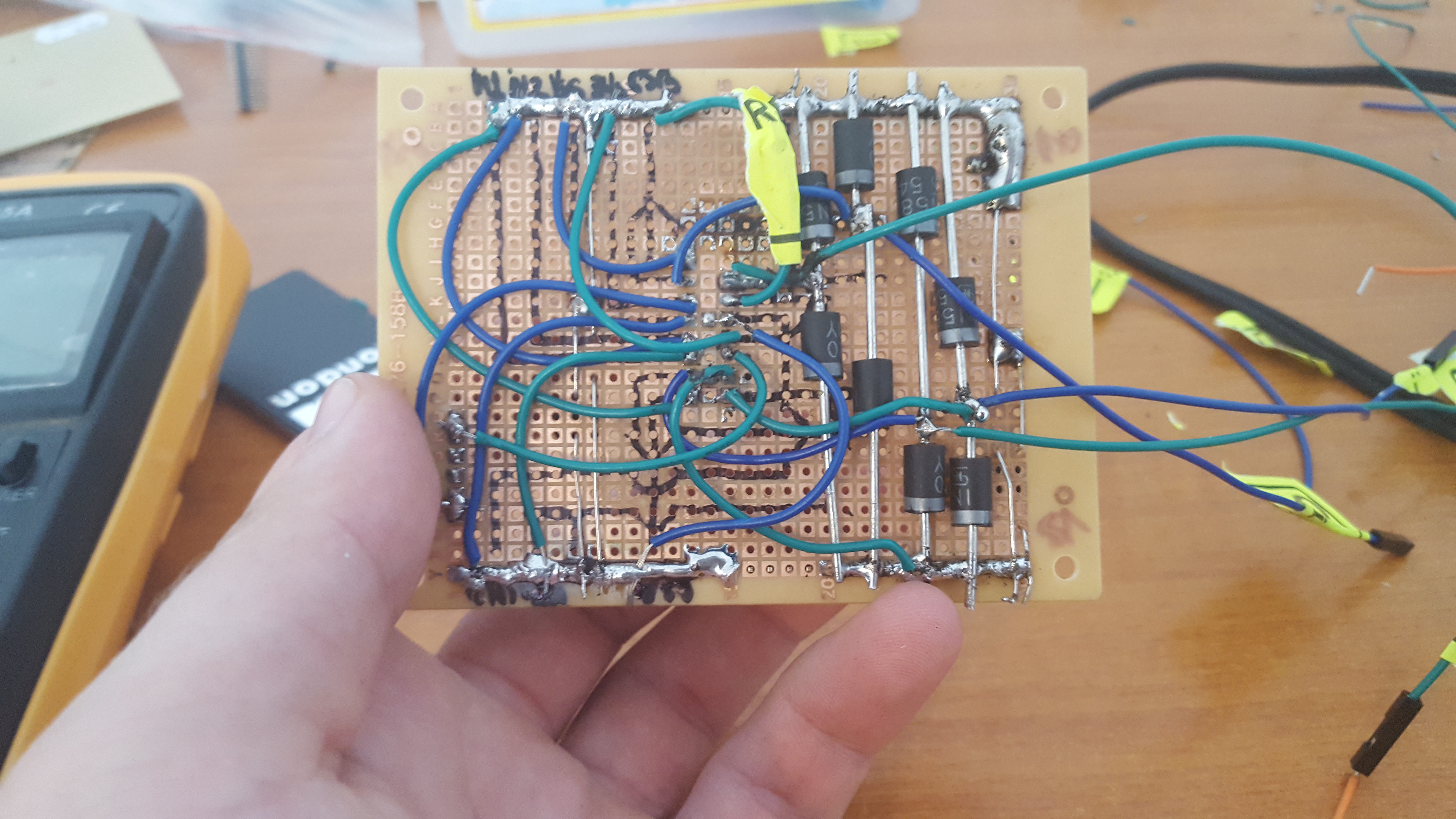
2. Am facut placa de suport pentru interfata cu L298N. Am intampinat dificultati in lipirea diodelor mari(3A) de inductie(1N5820) astfel circuitul este mai inestetic.
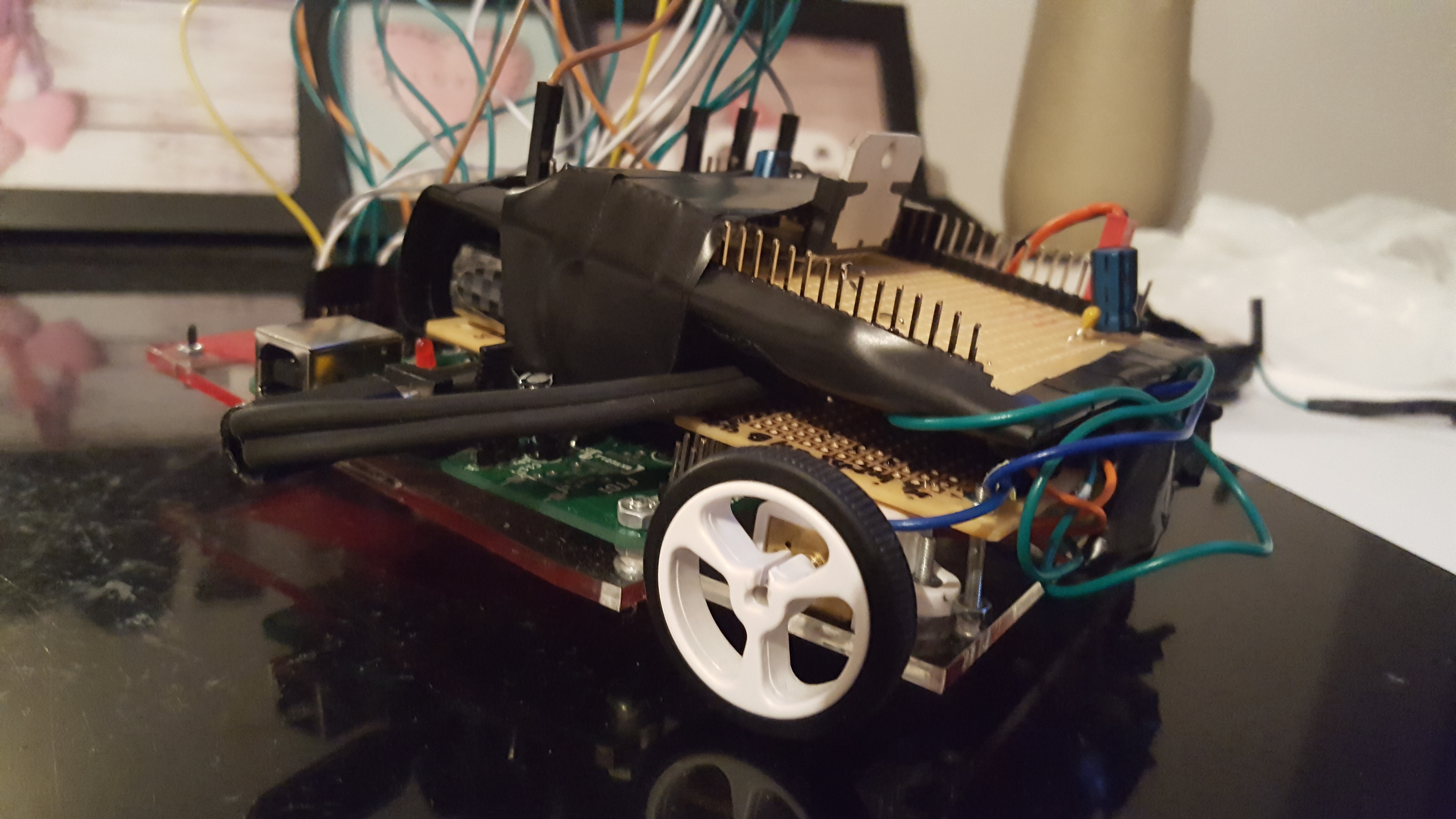
3. Am izolat integral circuitul,interfata cu L298N cu banda izolier pentru asezarea circuitului pe placa de baza:

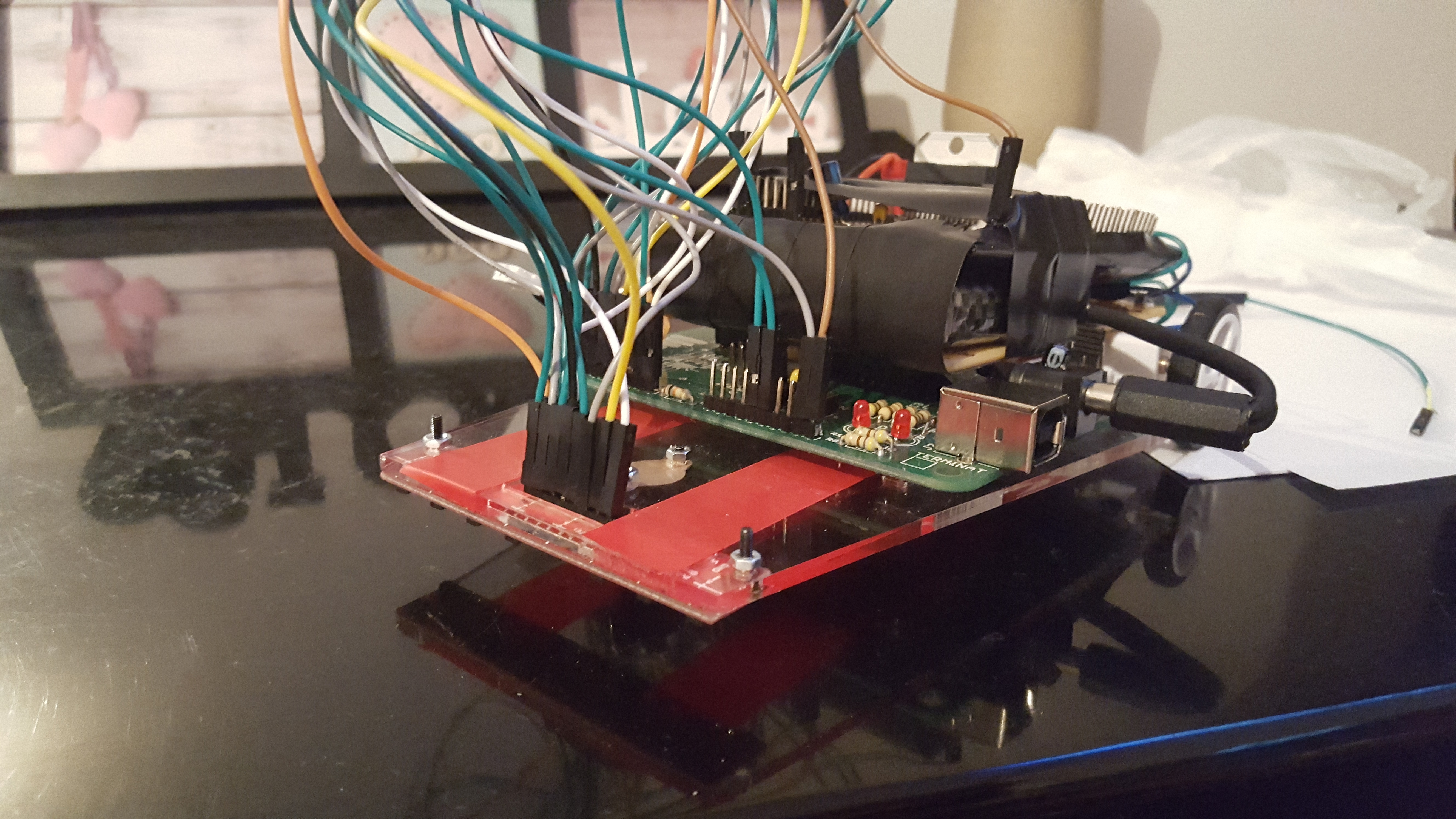
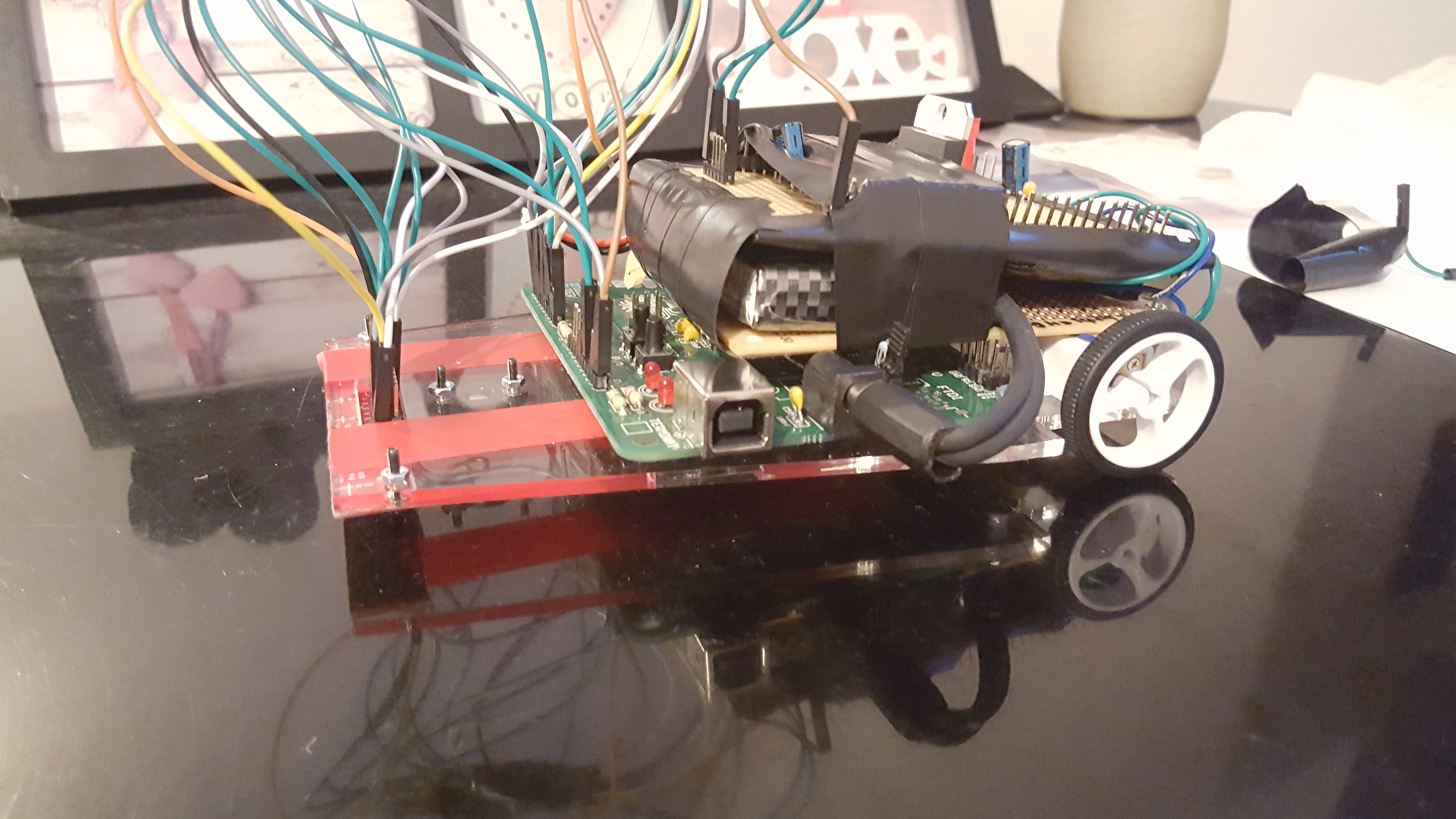
4. Am fixat placa de interfata cu L298N pe placa de baza si am facut conexiunile necesare pentru finalizarea proiectului.
Asa arata imaginea finala a robotului.

Am atasat un mic filmulet cu felul in care functioneaza in jurnal.
Concluzii
Download
Arhiva surse: 334ca_aldoiu_stefan_alexandru.zip
Jurnal
1. Saptamana 1 - Am achizitionat placa si componentele auxiliare de 12v.
2. Saptamana 2 - Am lipit componentele pe placa de baza si m-am informat si comandat componentele aditionale pentru construirea line-follower
3. Saptamana 3 - Am asteptat componentele de la Farnell- au intaziat o saptamana (o eroare a site-ului lor)
4. Saptamana 4 & 5 - Am facut placa de interfatare cu L298N , am facut lipiturile necesare si am incheiat constructia proiectului.
Dintr-un motiv inca necunoscut , am reusit sa ard 'gandacul',ATMEGA. Drept urmare pentru implementarea codului si efectuarea testelor necesare mi-am rezervat doar 2 zile. Am avut o problema de constructie, si anume din cauza bateriei, robotul a devenit mai greu si motoarele fiind de 10:1 (nu are cuplu mare) nu pot misca robotul decat la turatie destul de mare. Acest lucru a insemnat un control de o calitate semnificativ mai mica, din acest motiv motoarele au suferit socuri multiple, ceea ce a cauzat un mers 'Descentrat'.
Vina a fost a mea deoarece trebuia sa fiu inspirat in a cumpara motoare de cuplu mai mare(30:1).
Astfel am adaugat un filmulet in felul in care functioneaza motorul(am ales o tensiune mai joasa si inegala pentru amble motoare cand merg in linie dreapta pentru a “mintii” damage-ul).
https://www.youtube.com/watch?v=zCRgrbAFzOA&feature=youtu.be
Am adaugat deasemenea un filmulet care arata lipsa cuplului.
https://www.youtube.com/watch?v=ln9lESi79qg&feature=youtu.be
Bibliografie/Resurse
Resurse Software: -laborator 0:http://cs.curs.pub.ro/wiki/pm/lab/lab0 si 3:http://cs.curs.pub.ro/wiki/pm/lab/lab3
Resurse Hardware: - farnell.com -https://www.robofun.ro/ -http://ro.farnell.com/ -https://www.optimusdigital.ro/
+ Indicatiile Laborantului care a reprezentat o resursa foarte importanta.
