
Brad-Mihai-Alexandru CĂPĂŢÂNĂ - Robot
Autorul poate fi contactat la adresa: Login pentru adresa
Echipa:
- Capatana Brad Mihai Alexandru 332CB
- Popa Ion Alin 331CB
Introducere
Proiectul presupune realizarea unui robot urmaritor de linie.
Descriere generală
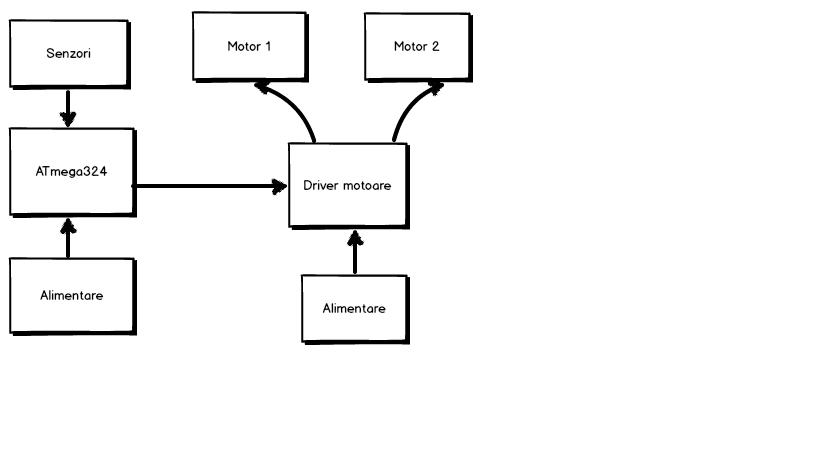
In urma citirii datelor de la senzori, robotul va seta viteza de turatie a motoarelor pentru urmarirea exacta a liniei.
Motoarele sunt alimentate de la o sursa separata de tensiune.
Hardware Design
Lista de componente:
- Encoder motor ( MCN-ENC-01 )
- Acumulator (SRS-03)
- Bluetooth modem (WIR-05)
- Servomotor (MCN-SEV-06)
- Arduino pro mini (ARD-14)
Software Design
In realizarea componentei software am folosit avr-gcc, Programmer's Notepad, respectiv WinAvr.
Rezultate Obţinute
Am reusit sa facem un line follower functional.
Concluzii
Download
O arhivă (sau mai multe dacă este cazul) cu fişierele obţinute în urma realizării proiectului: surse, scheme, etc. Un fişier README, un ChangeLog, un script de compilare şi copiere automată pe uC crează întotdeauna o impresie bună  .
.
Fişierele se încarcă pe wiki folosind facilitatea Add Images or other files. Namespace-ul în care se încarcă fişierele este de tipul :pm:prj20??:c? sau :pm:prj20??:c?:nume_student (dacă este cazul). Exemplu: Dumitru Alin, 331CC → :pm:prj2009:cc:dumitru_alin.
Jurnal
Puteți avea și o secțiune de jurnal în care să poată urmări asistentul de proiect progresul proiectului.
Bibliografie/Resurse
