
Alexandru Costin PRUNCU , Cosmin Gabriel SAMOILA- Phobos
Autorul poate fi contactat la adresa: Login pentru adresa
Login pentru adresaIntroducere
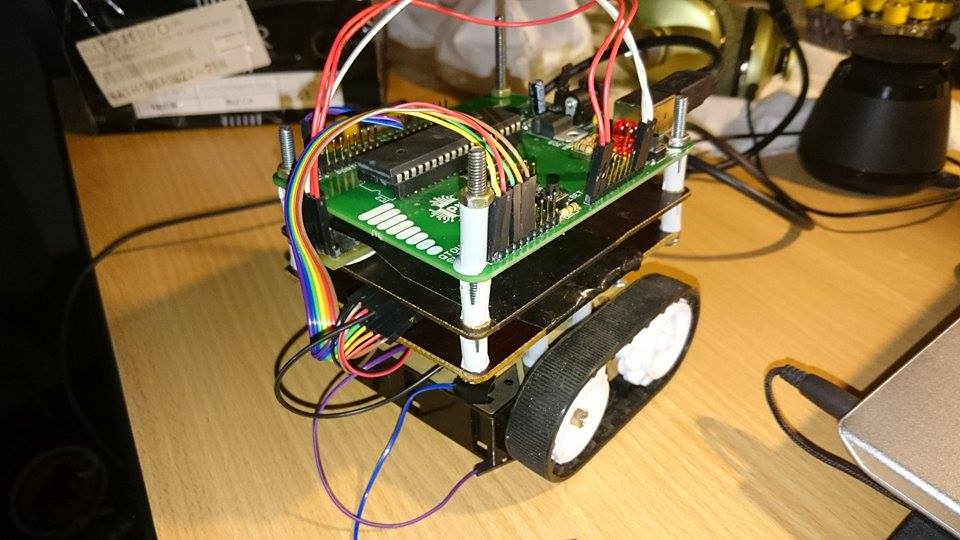
Acest proiect consta intr-un robotel tip sumobot, controlat prin Bluetooth, care poate sa detecteze obstacolele si sa se miste autonom.
Descriere generală
Proiectul consta in realizarea unui robot controlat prin bluetooth de catre utilizator sau lasat sa “patruleze” autonom folosind un algoritm ce analizeaza distantele din fata sa(in semicerc) si ia o decizie bazata pe analiza distantei.
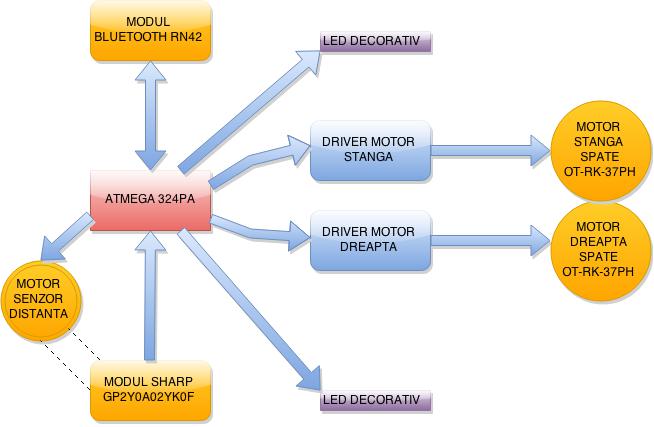
1.Schema bloc a robotului:
Hardware Design
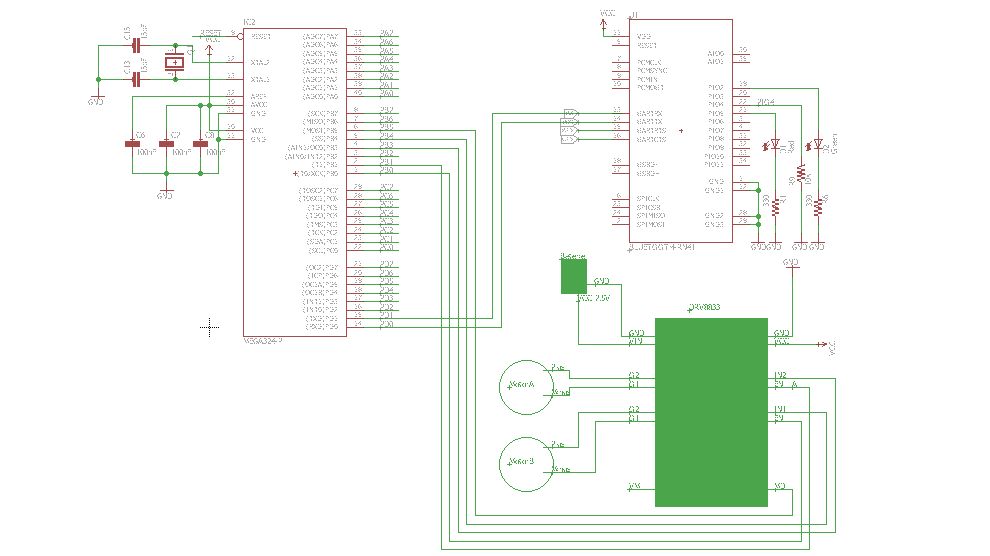
Schematic Eagle file: schema_electricaphobos.sch
Software Design
- Compilator: avr-gcc / win-avr
- Medii de dezvoltare: Programmer's Notepad + Android Studio( pentru creearea aplicatiei prin care controlam masina prin Bluetooth)
- Schelet cod: Laborator 1(usart) + Laborator 3(PWM)
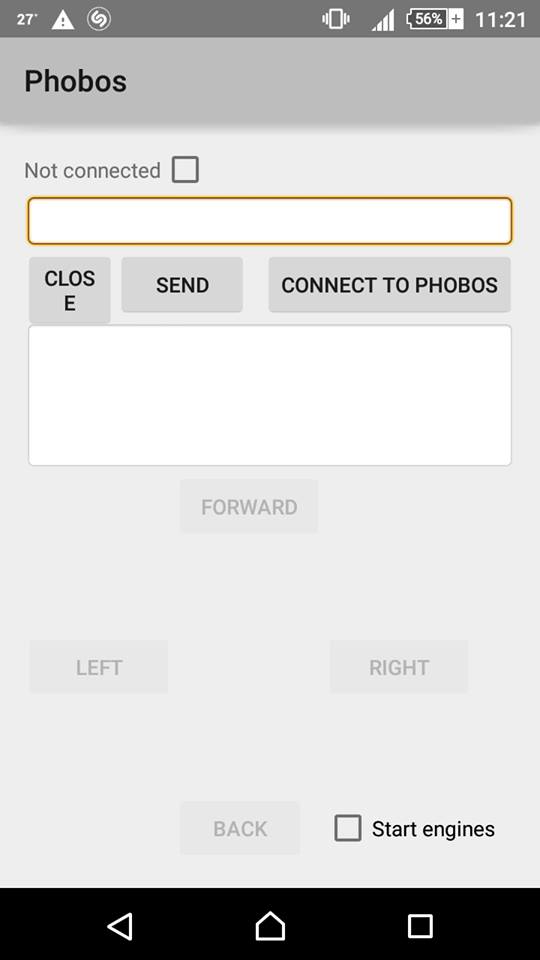
Interfata App(pre-alpha version ![]() ):
):
Interfata App(final version):
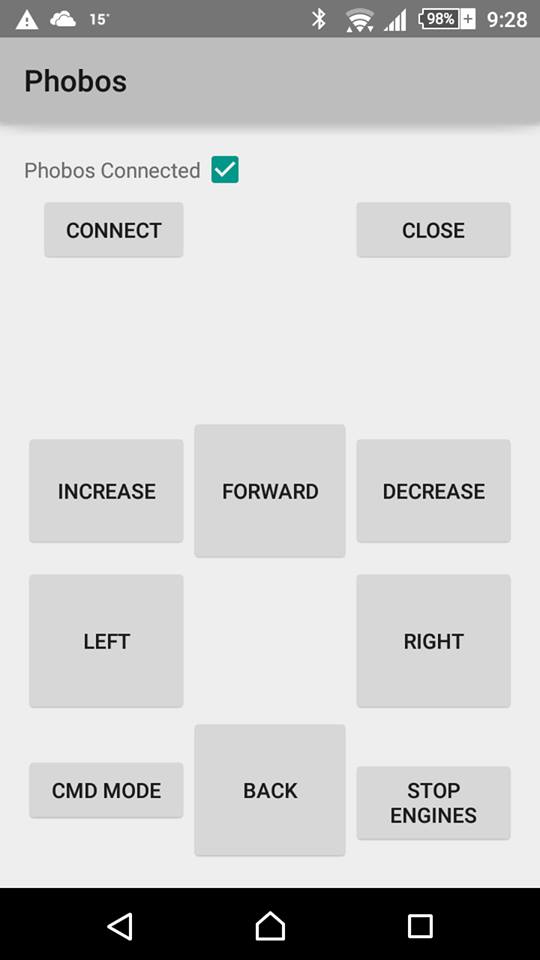
Command Mode on:
Rezultate Obţinute
- Partea mecanica masina 0 controlata cu microcontroler imprumutat de la un elicopter: view
- TBD nu putem proni motoarele dintr-un motiv necunoscut ( led uri conectate pe out la DRV 8835 functioneaza corect dar motoarele nu vor sa porneasca )
- Masina 1:
- Functionalitate masina Link1: watch
- Functionalitate masina Link2: Ui8u-kRW7hQ
Concluzii
- tot codul sursa este in laboratoare
- sa gasesti sediul RoboFun e mai greu decat ar parea(un subsol de casa, pe o strada obscura, in spatele unor porti inalte de fier, FARA niciun afis)
Controlul masinii(de la tastatura laptop/pc):
- 'w' - Forward
- 's' - Backward
- 'd' - turn right
- 'a' - turn left
- 'q' / 'e' - change speed
- 'x' - stop
Download
Surse: avr-sources.zip
Jurnal
- 27 apr - 11 mai: asamblarea masinii si a pieselor necesare.
- 11 mai - 18 mai: conectare bluetooth si testare
- 18 mai - 25 mai: testare PWM si functionalitate aplicatie Android
- 25 mai - TBA: debug Driver Motoare si finalizarea programului
- 28 mai - all DONE
Bibliografie/Resurse
Manual driver motor DRV8835 drv8835.pdf
Android Studio index.html
Utilizare BLUESMIRF introduction
Manual modul Bluetooth RN42 bluetooth_cr_UG-v1.0r.pdf
Asamblare sasiu Pololu Zumo zumo_chassis.pdf
