
Andrei Cramariuc - Mapper
Autorul poate fi contactat la adresa: Login pentru adresa
Introducere
Scopul acestui proiect este de a construi o masinuta cu un senzor de distanta, care sa fie capabila sa construiasca o harta a mediului.
Descriere generală
Plan hardware
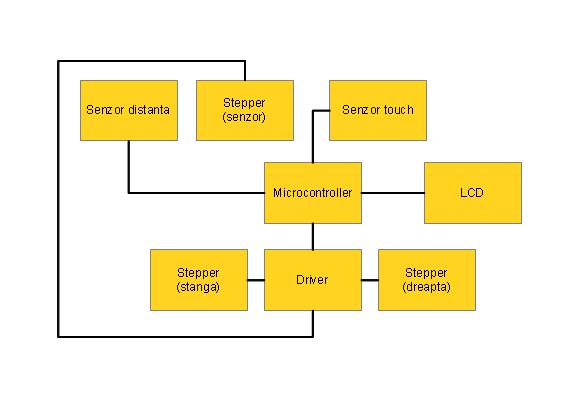
Module programare
- Intreruperi senzori touch
- 3 PWM-uri pentru controlul steppere
- Conversie ADC a senzorului distanta
- Algoritm de constructie harta
- Desenare harta pe LCD
Hardware Design
- Stepper 200 pasi Nema 11 (x3)
- Driver A4988 (x3)
- Senzor de distanta IR 15 - 150cm
- LCD Grafic 128×64 Serial
- Microswitch (x2-4)
- Buton start/stop

Software Design
Folosing avr-gcc:
sensor.c:
- Initializarea convertorului ADC
- Conversie on request
- Conversia din tensiune in distanta folosind o formula care aproximeaza graficul din datasheet
lcd.c:
- Initializarea conexiunii USART
- Crearea unei interfete care sa foloseasca functionalitatile controlerui din LCD
timer.c
- Driverele stepperelor se controleaza cu PWM-uri, unde frecventa semnalului este frecventa de pasi a motorului
- Initializare timerului pt PWM
- Realizarea schimbarii frecventei fara ca sa apara distoriuni in semnal
- Numarare de pasi facuti pentru calculul distantei folosind intreruperi
- Acceleratia lineara a stepperelor (stepperele nu pot fii setate direct la frecventa dorita)
Rezultate Obţinute
Cele mai mari dificultati:
- Atentie mai mare la specificatiile microcontrollerului. El contine un singur timer pe 16-bit, celelalte au frecventa minima (60 Hz) prea mare pentru a accelera cum trebui un stepper.
- Cel putin driverul senzorului trebuia setat sa faca pasi mai mici. Stepperele vibreaza mult si par sa nu functioneze bine la frecvente joase.
- Senzorul de distanta nu este foarte precis. In jumatatea mai mare a intervalului de operare diferentele intre valori sunt foarte mici si creaza imprecizii.
Robotul:


Bibliografie/Resurse
