
Line Follower
Popa Adrian 334CA
Stanciucu Catalin 331CB
Introducere
Proiectul consta in realizarea unui robot autonom care se deplaseaza pe o suprafata alba si urmareste o linie neagra.
Schema bloc

Hardware Design
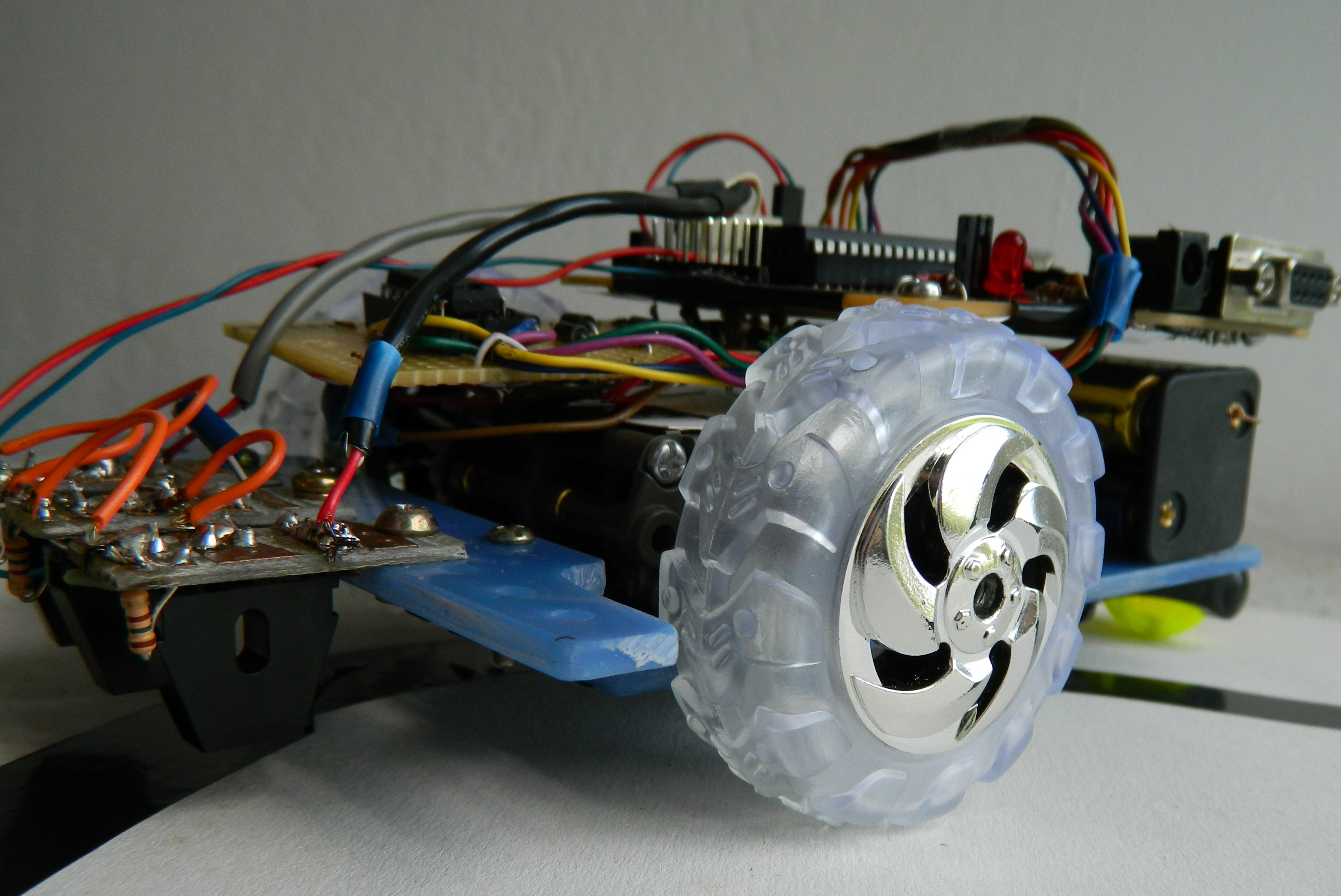
Componente robot:
-placuta PM
-senzori
-punte H
-cutie de viteze dubla
-sasiu , roti , baterii
Senzori:
-3x octocuplor cu reflexie
-3x rezistenta 150ohm
-3x rezistenta 15kohm
-3x placuta imprimata cupru



Senzorii sunt alimentati in paralel de la VCC-ul placutei.Asezati la un cm de suprafata , pe negru dau un output de 3v iar pe alb 1-1,5v.
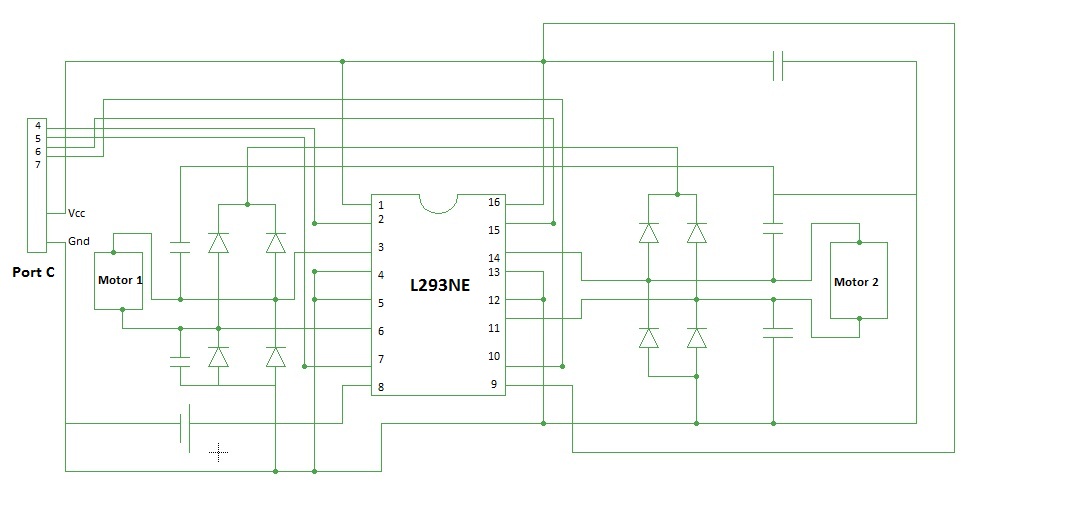
Puntea H:
Am folosit un driver de tip punte H, L293NE , 8 diode de protectie si 5 condensatoare.
Driverul e alimentat de la VCC-ul placutei (5V) , iar pentru motoare am folosit 3 baterii alkaline de 1,5V.


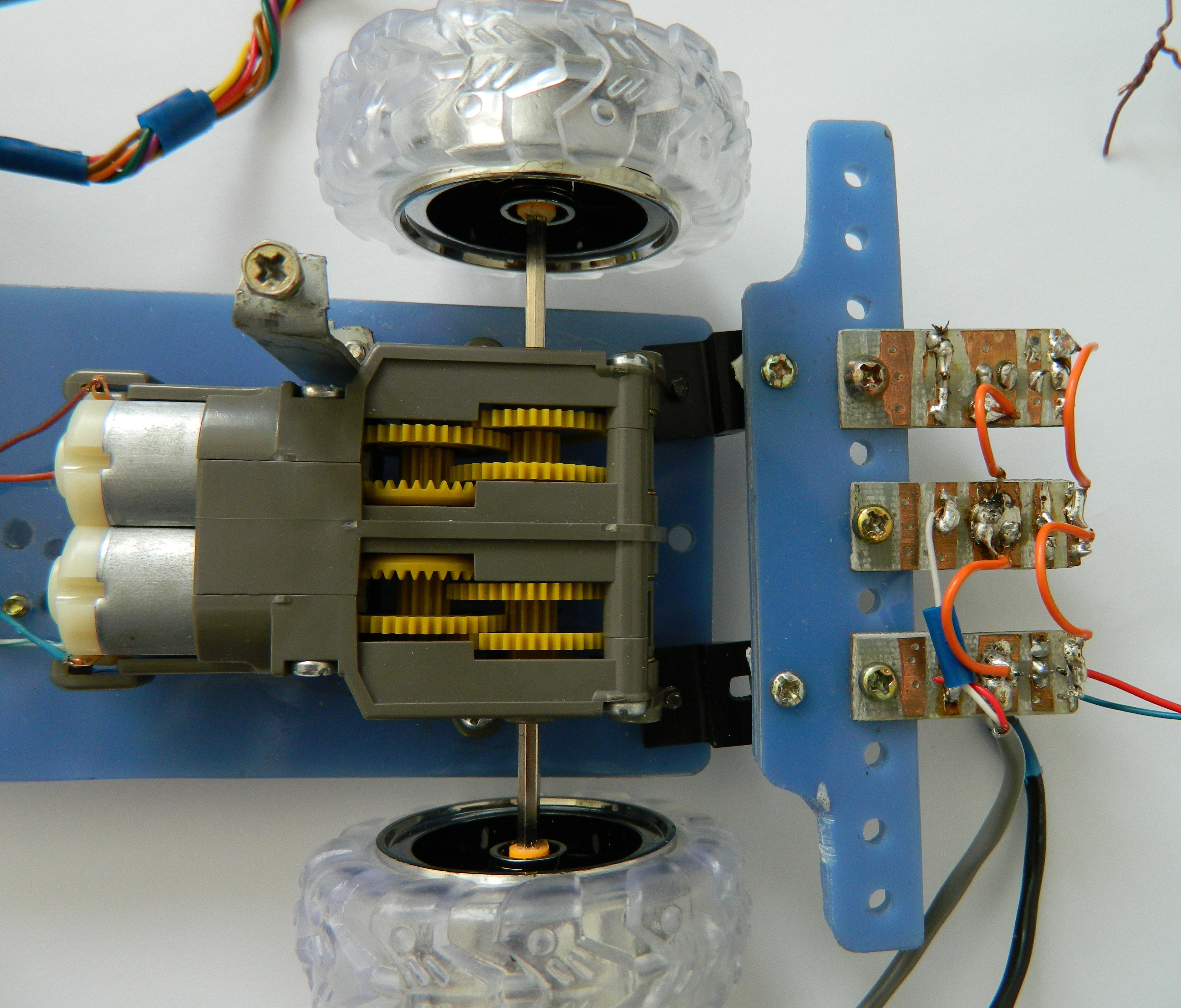
Sasiu , Motoare , Roti:
Am folosit cutia de viteze dubla Tamiya , asamblata pe reductorul 203:1. Motoarele functioneaza intre 3 si 6V .
Rotile din fata si cea “de carucior” din spate sunt luate de la o masinuta de jucarie.
Sasiul , distantierele si suportul senzoriilor sunt home made , confectionati din plexi glass.
Software Design
Am implementat folosing limbajul de programare C si compilatorul avr-gcc. Initial motoarele sunt oprite. Daca senzorul din centru detecteaza negru ambele motoare primesc comanda de pornire; cand unul din senzorii laterali detecteaza negru motorul din partea sa se va opri, lasand celalalt motor sa mearga pentru a vira.
Pentru senzori am folosit portul A, atat alimentarea cat si output-ul senzorilor; pentru motoare am folosit portul C.
Am atasat arhiva cu codul sursa si fisierul hex.
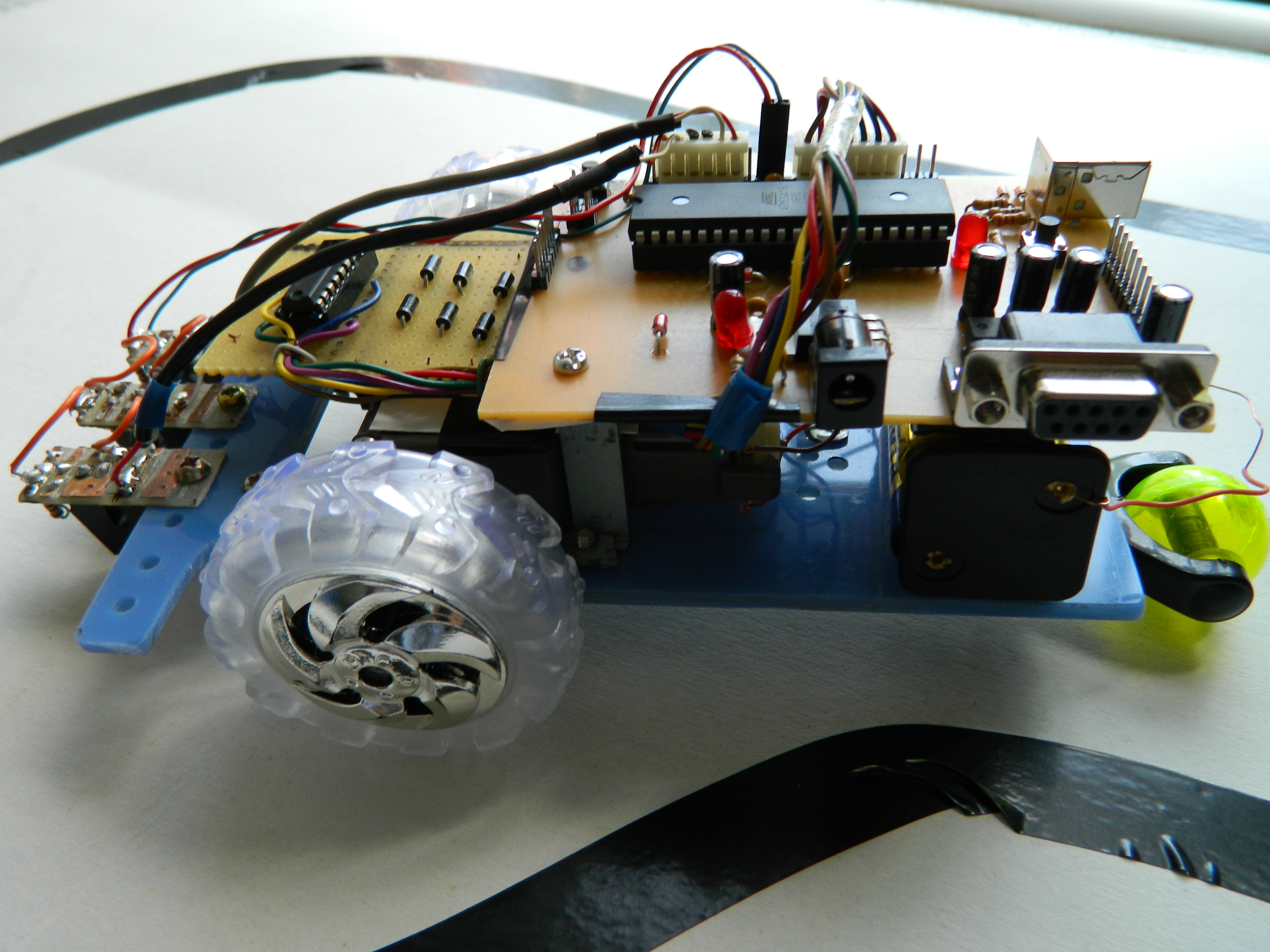
Rezultate Obţinute
Am obtinut o masina fuctionala , care urmareste cu succes linia neagra, dar care are unele limitari din cauza rotilor nepotrivite.

Video
Concluzii
La finalul acestui proiect,putem spune ca a fost foarte interesanta aceasta experienta .
A fost pentru prima data cand am facut debugging hardware.
Putem arata o masinuta facuta cap coada de noi, harware si software.
Bibliografie/Resurse
