
Line Follower
Introducere
Un line follower este o masina care urmareste o dunga neagra.
Descriere generala
Senzorii inregistreaza date despre suprafata pe care se afla si le trimite catre ATMEGA16 . Acesta proceseaza informatiile de la senzori pentru a determina cum sa comande motoarele apoi trimite comenzile pentru motoare driverului L298N,care trimite comenzile mai departe catre motoare.

Hardware Design
- Lista de piese
- piesele necesare realizarii placutei cu ATMEGA16 http://cs.curs.pub.ro/wiki/pm/tutorial/placa
- 5 leduri infrarosii
- 5 fototranzistori
- 5 rezistente de 100Ω
- 5 rezistente de 750kΩ
- fire
- pini
- 1/2 fund de lemn
- suruburi
- cleme
- conectori
- 1 driver L298N
- 2 condensatoare de 100nF
- 8 diode 1N4007
- 1 baterie 9V
- 3 baterii 1.5V
- set de 2 motoare de la Tamiya
- Scheme electrice
- Schema folosita pentru conectarea unui motor la driverul L298N

- Schema unui senzor infrarosu

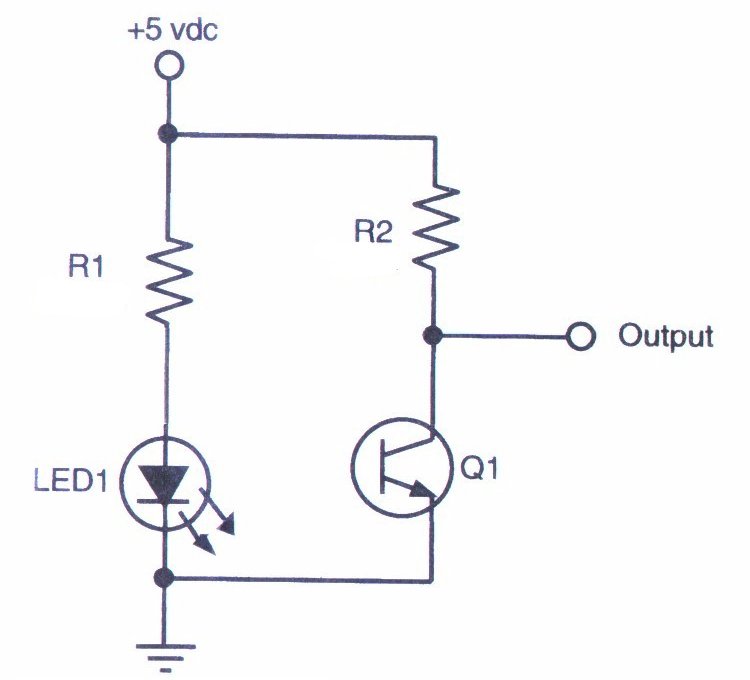
R1 = 100Ω
R2 = 750KΩ
In teste s-au obtinut valori de ~1.5V pe alb, ~4V pe negru
Intrarile de la senzori se fac pe canalele ADC.
Software Design
Software-ul a fost scris in C, sub Linux. Acesta este implementat modular: - un modul pentru initializare si citire de la ADC - un modul pentru initializare PWM pentru controlul vitezei motoarelor - un modul ce contine functii pentru condus masina (adjustat viteza, viraje, citit date senzori) - modulul main, ce le integreaza pe toate.
Initial a fost gandit sa aplicam un algoritm PID, insa, din cauza problemelor tehnice, aceasta idee a fost abandonata. Cu programul actual, masina isi misca rotile dreapta/stanga in functie de care dintre primul sau ultimul senzor receptioneaza negrul.
Rezultate Obtinute
Se misca masinuta :D
Din pacate, nu prea corect, din cauza problemelor intampinate:
- lipsa bootloaderelor pana ieri - luni 21 mai
- lipsa bateriilor suficient de puternice pentru a misca masina; gearbox-ul era setat pe 50:1 si tocmai cu 2 ore inainte de prezentare ne-a venit ideea de a o seta la 200:1 :D
- si, nu in ultimul rand, mufere USB pretentioase - nu merge programata placa decat daca tinem cablul in mufa intr-o anumita pozitie - cate-odata chinuindu-ne si cate 10 minute sa instalam programul pe placa.


Download
Resurse
Datasheet ATmega16 : doc2466.pdf
Datasheet driver L298N 052daje928cw7pc0uqs1ipyryppy.pdf
pm
Multumiri
Multe multumiri celor care a inventat scoci-ul( si scotch-ului :P) Duct_tape
