
Line Follower
Echipa
Liviu Chircu & Costea Mihail, 331CB
Descriere Generală a Proiectului
Robot 2WD ce urmărește o linie neagră trasată pe un fundal alb prin intermediul unei benzi de senzori IR cu output digital.
Componente Necesare



- Kit Robot 2WD
- cumpărat de pe sierra.ro - Sasiu pentru robot 2WD
- Sasiu robot asamblat
- 2x Roti robot
- 2x Motor 6V
- Suport pentru 4 buc baterii sau acumulatori R6 (AA)

- Bară de senzori digitali
- Se poate conecta pe oricare din cele 4 porturi ale microcontrollerului
- Pinii respectivi trebuie marcați ca input, și trebuie activate rezistențele de pull-up
- Cumpărată de pe sierra.ro - senzori QTR-8RC
- Schema componentelor baretei:

- 1 condensator polarizat de 100μF, merg și cei de 25μF de pe plăcuță (daca v-au mai ramas)
- 1 condensator de 100nF (ceramic)
- 8 diode Schottky
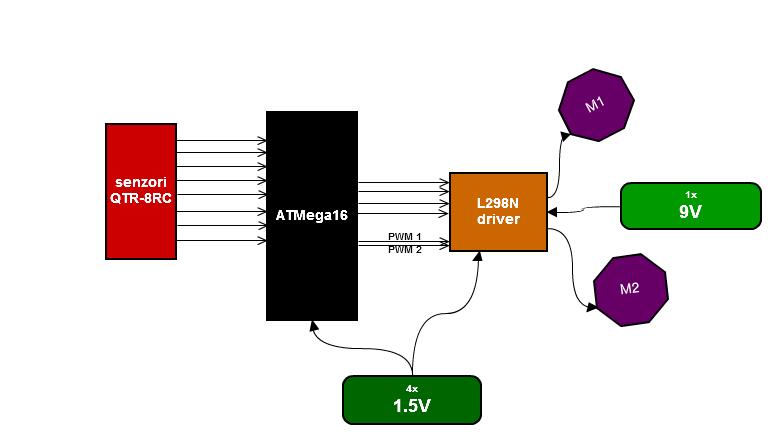
- 4 baterii de 1.5V (pentru alimentarea plăcuței și a driverului)
- 1 baterie de 9V (pentru alimentarea motoarelor)
- fire. Puteți folosi chiar și firele unui cablu UTP (1m ar trebui să ajungă).

- Driver pentru motoare, de pe ro.farnell.com - model L298N
- Pinii IN1..IN4 de pe driver sunt conectati pe PORTC (pinii PC7..PC4) al microcontrollerului
- Pinii OUT1..OUT4 de pe driver sunt conectati la motoare, iar impreuna cu IN1..IN4 reprezinta directia de deplasare (în cod se setează acest lucru folosind macrodefiniții de forma DIR_MOTOR1_MOTOR2, exemplu: DIR_FW_FW)
- Pinii EN A si EN B de pe driver sunt conectati pe portul B, pinul OC0 (sau PB3), respectiv portul D, pinul OC2 (sau PD7) ai microcontrollerului si reprezinta viteza de deplasare
- Am conectat pinul VSS al driverului la alimentarea de 6V, comună cu plăcuța.
- Pinul VS (power supply pentru motoare) trebuie conectat la o sursă suficient de puternică, altfel motoarele vor trage tot curentul, iar plăcuța nu va funcționa corespunzător (ex: nu se încarcă programul… )
- Trebuie ținut cont de efectul curentului de inducție generat atunci când roțile sunt blocate, sau când se opresc motoarele! Acesta poate arde driverul. Așadar, se pun 8 diode Schottky (noi le-am ales aî să țină mai mult de 2A) pe OUT1..OUT4
- Masa este comună pentru tot ansamblul, simplificați pe cât posibil (cu cât mai puține fire, cu atât mai bine)
Interconectarea componentelor
Design traseu
- Robotul funcționează corespunzător pe trasee cu linii de lățime maxim 3cm
- Am improvizat un traseu folosind următoarele elemente de bază:


Codul folosit
- Cu cât linia este mai aproape de marginea baretei de senzori, cu atât viteza roții mai apropiate de linie este mai mică
- În cazul în care mașina iese de pe “pistă”, aceasta se va orienta câtre ultima direcție în care a observat linia (stânga sau dreapta)
- Codul este ușor de înțeles și este bine comentat
- O arhivă cu codul folosit de noi în varianta finală: lchircu_mcostea_331cb.zip
Rezultate Obținute



- Proiectul este funcțional, mașina urmărește în mod corespunzător dunga neagră.
- Întrucât comanda pieselor ne-a întârziat foarte mult, nu am mai avut timp să implementăm o versiune îmbunătățită a algoritmului de deplasare (ex: control PID, sau mai multă atenție la ce curent trece / ar putea să treacă prin motoarele noastre.. ).
Concluzii
- Realizarea proiectului a fost o experiență interesantă pentru noi, întrucât este primul proiect de acest tip pe care îl realizăm
- Atunci când comandați componente de pe sierra.ro, faceți comanda prin Fan Courier, nu prin poștă! Pentru 8 lei în plus, economisiți până la 3 săptămâni de așteptare.
- Puteți vedea un filmuleț cu bolidul albastru aici:
Resurse / Legături externe
- Datasheet ATMega16
- Datasheet L298N
- Ghid de utilizare pentru senzorii digitali
- Un ghid de construire al unui line follower de la zero: http://www.societyofrobots.com/member_tutorials/book/export/html/350
