Table of Contents
Andrei - Ionuţ CHERECHEŞU (87835) - Anti-crash BT Car
Autorul poate fi contactat la adresa: Login pentru adresa
Introducere
Proiectul meu reprezinta o masina cu telecomanda controlata prin Bluetooth de pe un smartphone, prin intermediul unei aplicatii. Masinutele cu telecomanda au fost jucariile mele preferate in copilarie, iar posibilitatea construirii uneia acum e un lucru captivant. Insa, cine doreste sa isi accidenteze jucaria, chiar si din greseala? Solutia la aceasta problema e proiectul meu: fata de o masina obisnuita cu telecomanda, masina va detecta obstacolele aflate la distanta relativ apropiata si va frana, in speranta evitarii impactului.
Descriere generală
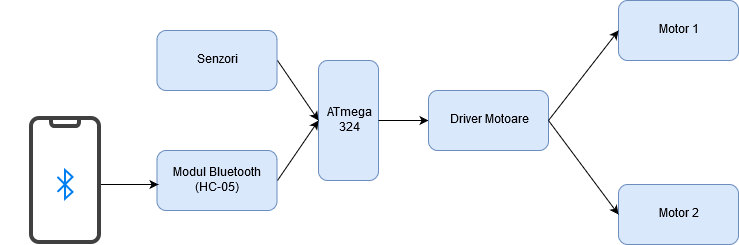
Masina va primi comenzi prin intermediul aplicatiei de pe smartphone si informatii de la senzorii montati pe ea.
Comenzile de la utilizator vor fi trimise cu ajutorul driver-ului de motoare catre cele doua motoare electrice, conectate la rotile motrice. In cazul apropierii de un obstacol (detectarea se face cu ajutorul senzorilor), se va suprascrie orice comanda a utilizatorului si se va frana la maximum (eventual bracare stanga/dreapta a directiei).
Hardware Design
Hardware utilizat:
- ATmega324
- Modul Bluetooth
- Senzori ultrasonici
- Driver motoare
- Sasiu cumparat (la pachet cu motoarele, anvelopele, baterie etc.)
Schema Electrica:

Software Design
Pentru a trimite comenzi masinii, am folosit aplicatia Android: Bluetooth Terminal HC-05. Codificarea semnalelor a fost astfel:
- 'u' → Up
- 'd' → Down
- 'l' → Left
- 'r' → Right
- 'V' → Activare/Dezactivare senzori SR-04
Modulul Bluetooth comunica cu placa prin USART, folosind implementarea din laborator. Pentru a putea primi date de la HC-05, am facut un divizor de tensiune (dintr-o rezistenta de 1K, in paralel cu 2 rezistente de 1K in serie), asigurand un voltaj de 3.3V pe RX-ul modului.
Am folosit 2 senzori SR-04, pentru a imbunatati detectia obstacolelor. Se seteaza pinul 'trigger' pe HIGH, apoi pe LOW. Se reseteaza timer-ul, si apoi se masoara timpul de la momentul initiial, pana cand soseste o intrerupere (echo), si se calculeaza distanta. Daca distanta e prea mica, masina se opreste.
Motoarele sunt controlate folosind un driver L298N, ce controleaza motoarele concomitent pe stanga si concomitent pe dreapta ale masinii. In acest fel asiguram virarea.
Rezultate Obţinute
Comunicarea cu masina si senzorii este reusita. Din cauza voltajului scazut in bateriile prevazute in kit-ul cumparat, nu am reusit sa asigur o tensiune corespunzatoare alimentarii motoarelor si acestea nu functioneaza la capacitate maxima.

Concluzii
In concluzie, a fost un proiect interesant, din care am invatat multe despre hardware, cum sunt construite pana si cele mai banale jucarii electronice si cum se folosesc echipamente electronice de baza.
Download
Bibliografie/Resurse
- Documentația în format PDF