Table of Contents
Andreea-Loredana DIEACONU (66963) - Nume proiect
Autorul poate fi contactat la adresa: Login pentru adresa
Introducere
Proiectul consta in realizarea unui robotel path follower capabil sa se deplaseze in coordonate carteziene (x, y).
Am ales sa implementez un path follower deoarece ideea de a il face sa se miste m-a fascinat ceva timp ![]()
La inceput am inclinat spre line follower, bine-cunoscutul robotel care domina PM fair de ani buni ![]() , dar am vrut tot odata sa incerc ceva nou. Cel care mi-a propus acest proiect a fost Dan, caruia ii multumesc pentru minunata idee
, dar am vrut tot odata sa incerc ceva nou. Cel care mi-a propus acest proiect a fost Dan, caruia ii multumesc pentru minunata idee ![]()
Descriere generală
Robotelul se va deplasa intr-un punct dat.
Robotul consta in: roti, driver pentru coordonarea rotilor, microcontrollerul AtMega324A si encodere pentru a calcula distanta parcursa.
<imgcaption hc_06|Schema block>  </imgcaption>
</imgcaption>
Hardware Design
| Listă de piese | |
|---|---|
| Nume | Distribuitor |
| Placa de baza | Echipa PM |
| ATMega324A, rezistente, condensatoare etc | Denisa Sandu |
| Driver Motoare | RoboFun |
| Motorase | RoboFun |
| Suport Prinderi Motorase | RoboFun |
| Encoder | RoboFun |
| Roti | RoboFun |
| Ball Caster pentru sustinere Robot | RoboFun |
Mediu de dezvoltare:
- Altium - schema electrica
<imgcaption hc_06|Schema electrică>  </imgcaption>
</imgcaption>
Software Design
Mediu de dezvoltare:
Algoritmi implementaţi:
- differential kinematics
Biblioteci:
- avr/interrupt.h
- util/delay.h
Rezultate Obţinute
Rezultatele obţinute în urma realizării proiectului:
- stiu sa lipesc componente
- stiu sa citesc un datasheet
- am invatat sa lucrez cu hardware-ul
- robotelul merge!!! (de fapt mergea, dar il repar eu pana la PM fair)
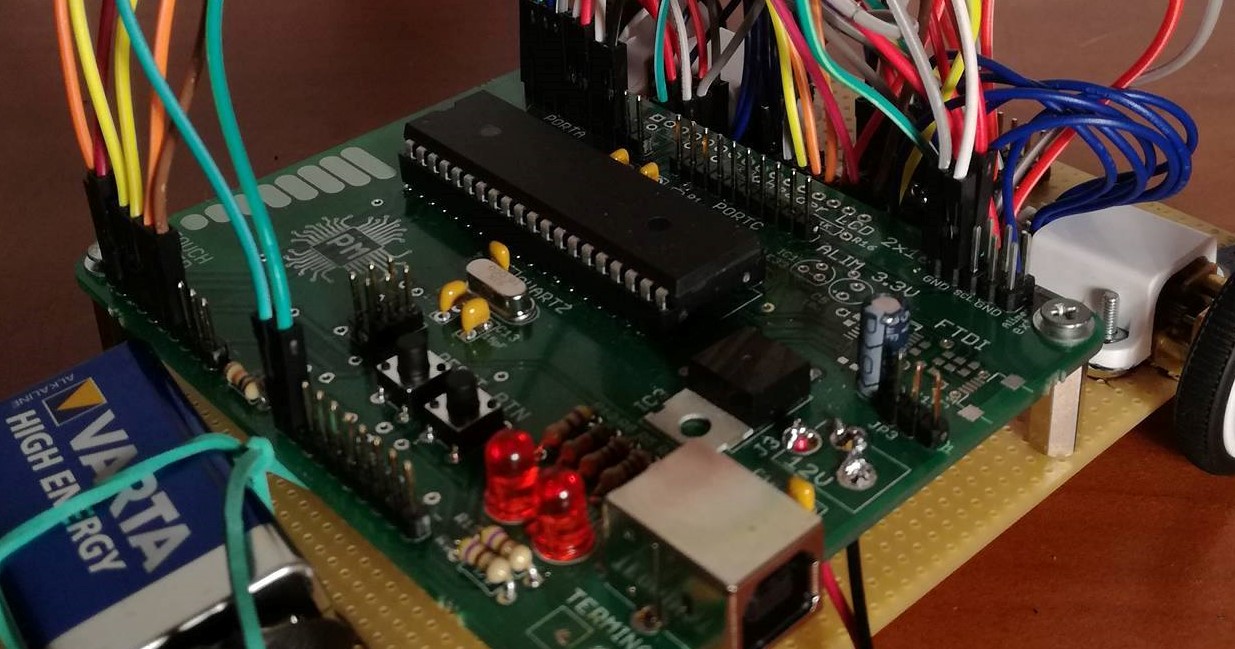
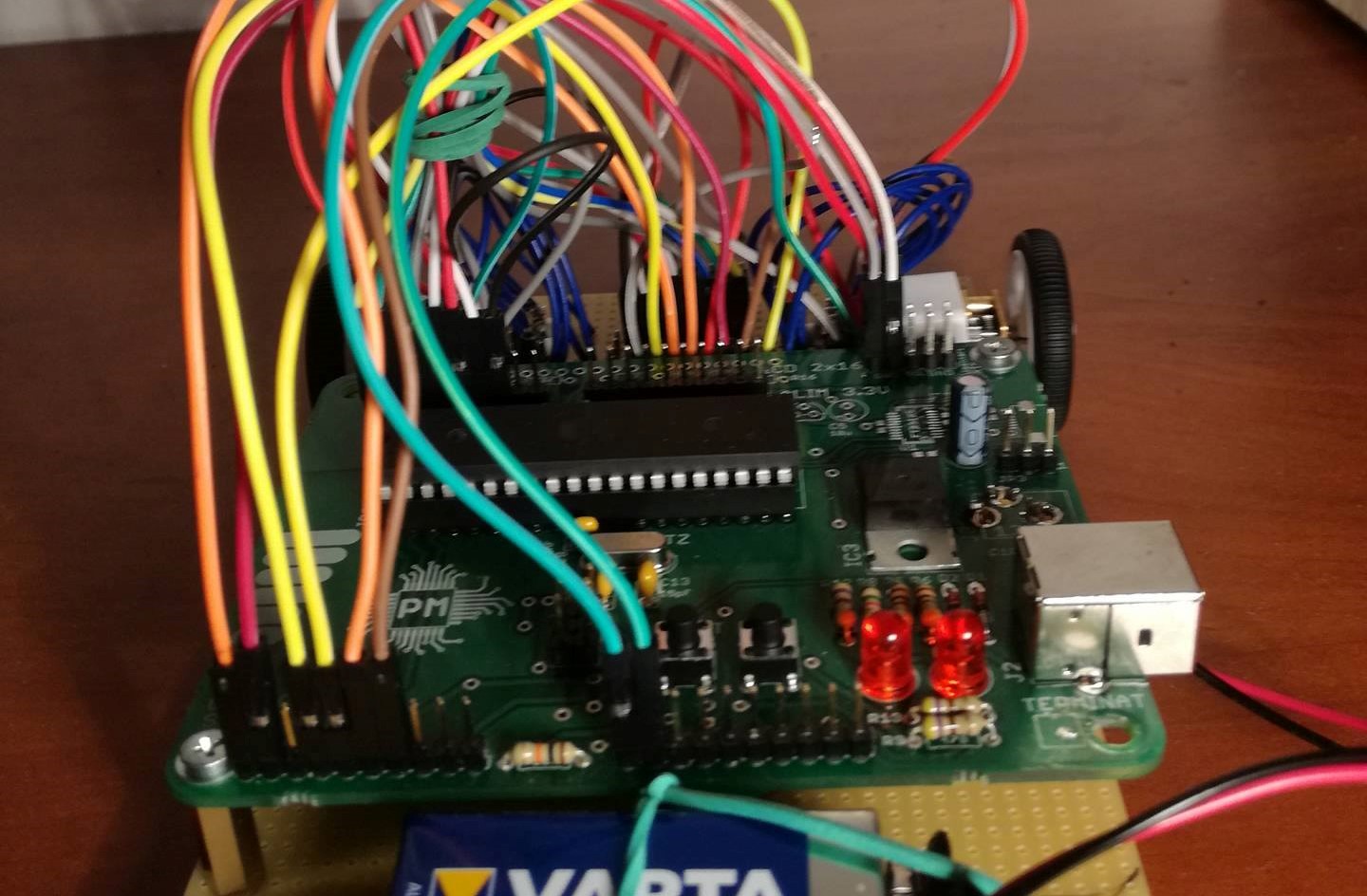
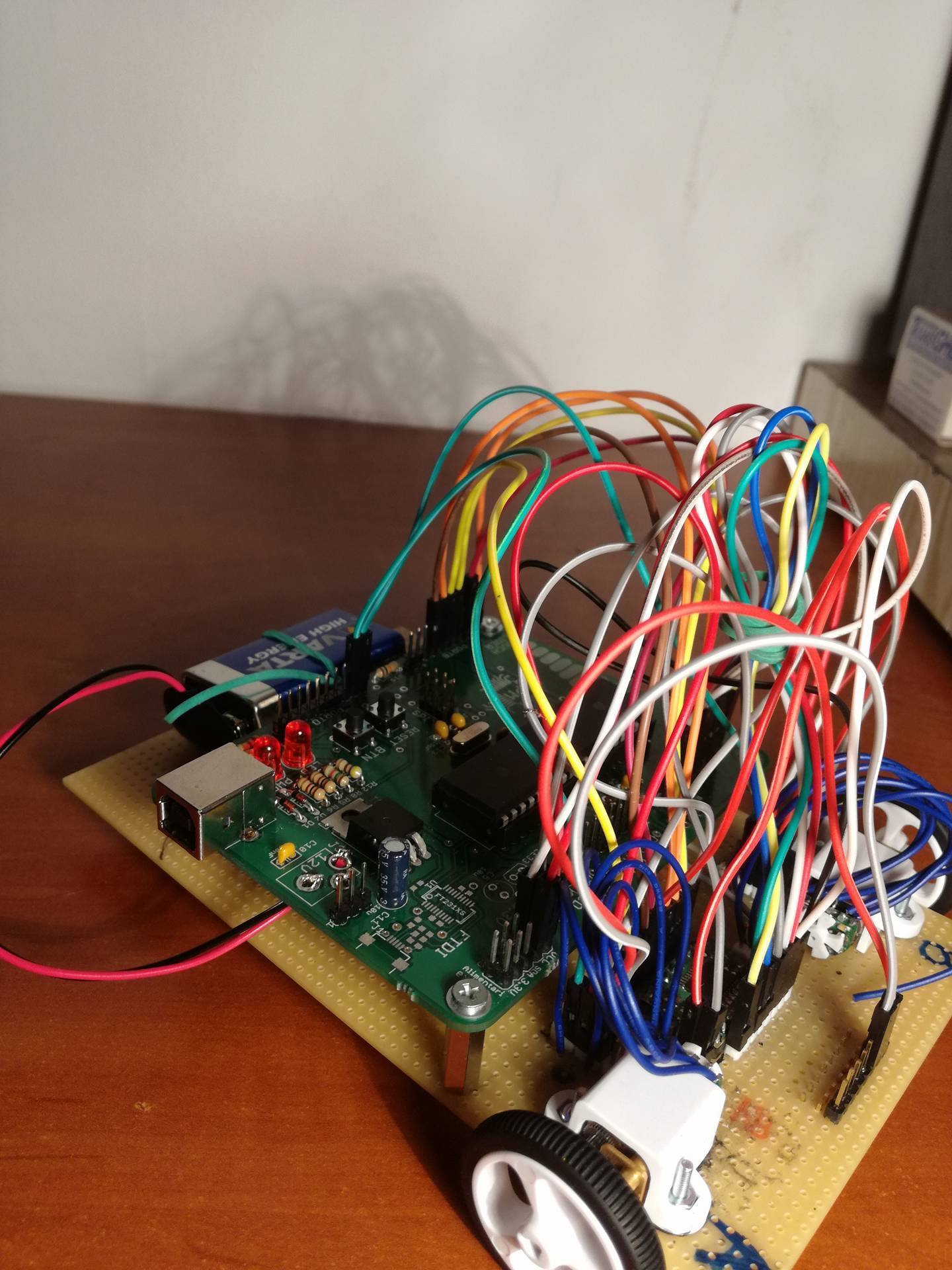
- rezultatul final PathFollower in motion
<imgcaption image1|> </imgcaption>
</imgcaption>
Concluzii
Awesome experience!
Am descoperit ca-mi place destul de mult partea de embedded!!
Ce mi-a placut?
- sa lipesc
- ca am facut ceva practic
- ca am facut noi totul, de la zero, cap coada
Ce am invatat?
- sa citesc un datasheet!!!
- sa lipesc - si mi-a placut foarte mult :D
Am avut foarte multe de invatat din acest proiect. A fost prima mea interatiune cu hardware-ul.
Download
Jurnal
- 23.04.17 - Creare pagină wiki
- 23.04.17 - Adaugăre schema bloc
- 23.04.17 - Adăugare componente hardware
- 7.05.17 - Finalizare placă de bază



- 7.05.17 - Adăugare schema electrica
- 9.05.17 - Am inceput sa lucrez pe placa de test si am lipit driverl pentru motoare


- 11.05.17 - Am lipit encoderele

- 18.05.17 - Am terminat partea de hard




Bibliografie/Resurse
- Documentația în format PDF
Resurse Software
- Exemple cu Atmega324PA - laboratoare PM
- Tutoriale Eagle - laboratoare IC
- Biblioteci Eagle:
Resurse Hardware