Table of Contents
Adelina-Georgiana DAVID (67095) - RoboChin
Autorul poate fi contactat la adresa: Login pentru adresa
Introducere
- Proiectul are ca scop realizarea unui robot care merge pe langa perete. Acesta trebuie sa mearga liniara, la o distanta prestabilita fata de perete.
- Ideile de la care am pornit au fost sa fac un dispozitiv care masoara distanta dintre el si un obiect, dar si un robot care sa se deplaseze automat, astfel, combinand cele doua proiecte a rezultat acest produs final.
Descriere generală

Hardware Design
Listă de piese:
- Baterie 9V + conector
- Fire mama-mama
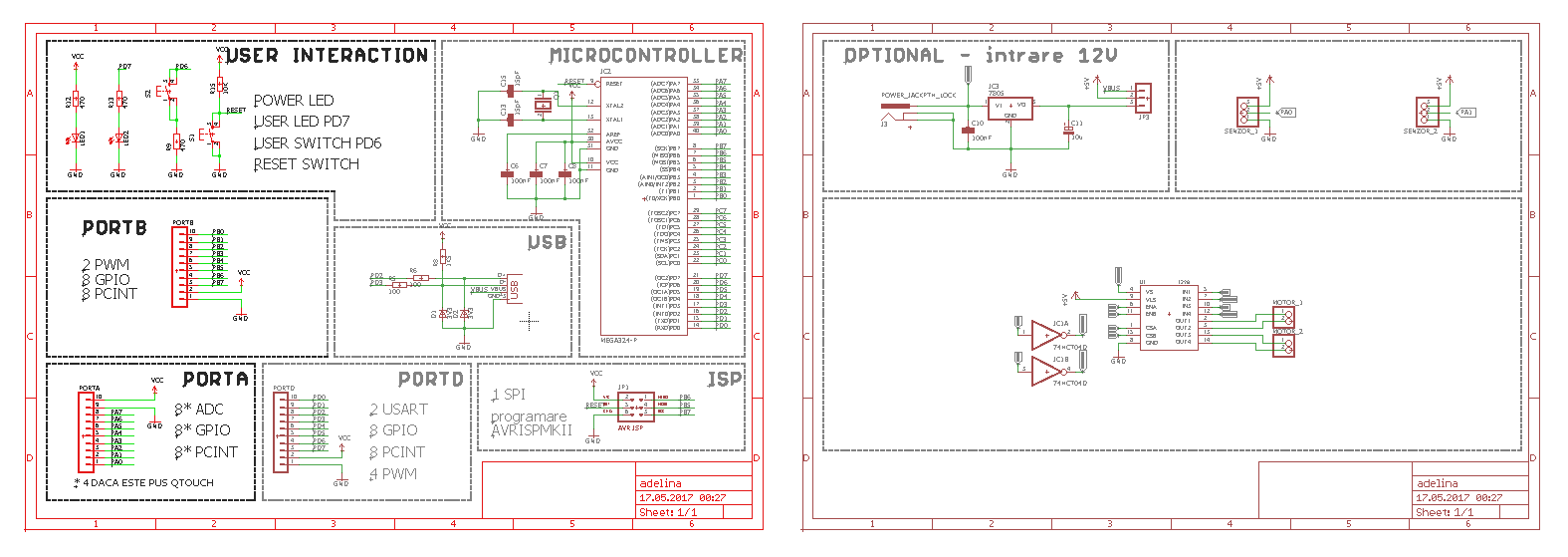
Schema electrica
Software Design
*Mi-am propus sa folosesc algoritmul Wall-follower right-hand (implementarea nu este gata, insa imi propun ca robotul sa mearga la o anumita distanta de perete, iar daca aceasta este mai mare sau mai mica, va fi programat astfel incat sa si-o corecteze.) *Datele senzorilor de distanță sunt citite prin ADC *Motoarele: controlate prin semnale PWM generate de un timer (0 sau 1).
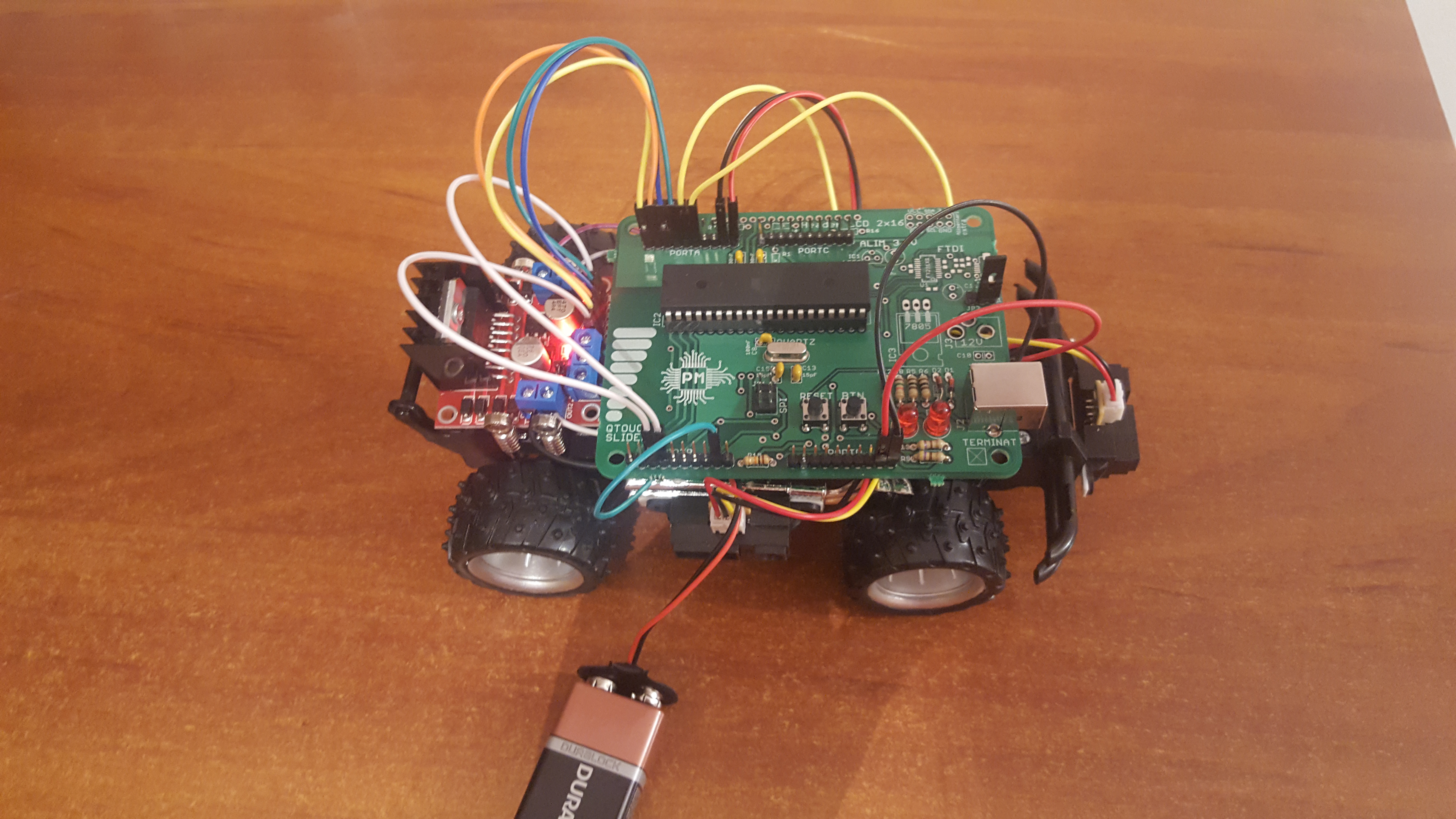
Rezultate Obţinute
Concluzii
*Proiectul a fost interesant pe partea hardware.Cea software imi da ceva batai de cap, dar rezultatul final va fi pe masura efortului.
*Am invatat cum sa lipesc o placuta ATMEGA
*Mi-am cumparat o masinuta pe care am demontat-o si am folosit sasiul acesteia (pentru siguranta si comoditate)
Download
Fişierele se încarcă pe wiki folosind facilitatea Add Images or other files. Namespace-ul în care se încarcă fişierele este de tipul :pm:prj20??:c? sau :pm:prj20??:c?:nume_student (dacă este cazul). Exemplu: Dumitru Alin, 331CC → :pm:prj2017:avoinescu:dumitru_alin.
Bibliografie/Resurse
Software: Algoritm Right Hand: http://en.wikipedia.org/wiki/Maze_solving_algorithm#Wall_follower
Hardware: ATMEGA: http://cs.curs.pub.ro/wiki/pm/_media/doc8272.pdf
Senzori: http://www.sharp-world.com/products/device/lineup/data/pdf/datasheet/gp2y0a21yk_e.pdf
Driver: http://www.st.com/web/en/resource/technical/document/datasheet/CD00000240.pdf
- Documentația în format PDF