Table of Contents
Răzvan-Mirel PARASCHIVU, Mădălina BĂLĂCEANU - Line Follower
Autorul poate fi contactat la adresa: Login pentru adresa
Autorul poate fi contactat la adresa: Login pentru adresaIntroducere
Proiectul nostru consta intr-un Line Follower, o masina inteligenta, care urmeaza traseul descris de o dunga neagra, pe fundal alb. Un line follower este primul pas catre masini inteligente autonome (auto-conduse). Desigur protoipurile dezvoltate de Google spre exemplu, folosesc sisteme mult mai avansate de radar, detectoare laser, sisteme de camere video, detectoare cu ultrasunete si GPS, insa un line follower este un echivalent foarte primitiv. Ideea ar fi ca daca am putea face o masina care sa urmeze un traseu stabilit ii putem adauga ulterior sisteme de evitare a obstacolelor, respectarea regulilor de circulatie (semafoare, cedeaza trecerea, etc) si obtine in final o masina inteligenta :)
Descriere generală
Schema Bloc
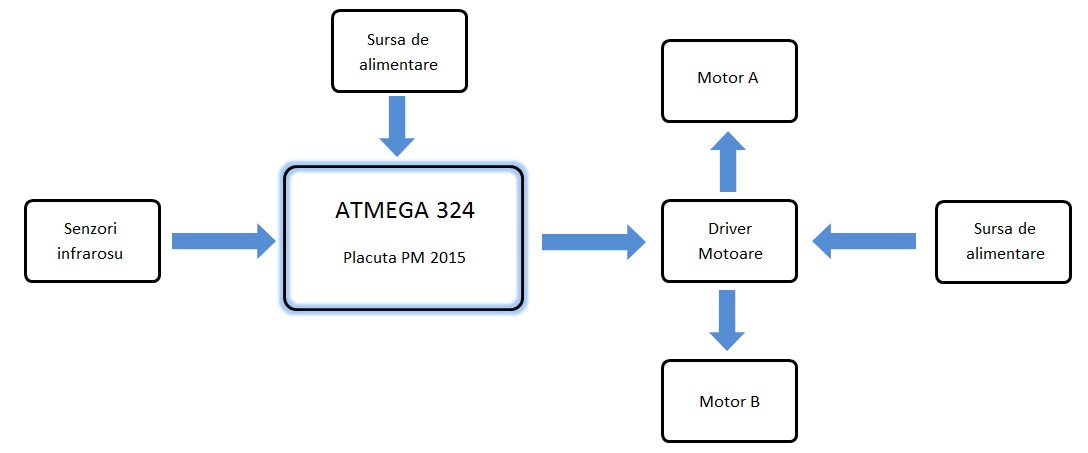
Descriere
Senzorii infrarosu vor trimite semnale catre procesor in functie de pozitia dungii negre, apoi procesorul, conform datelor obtinute de la senzori, va transmite driverului comezile pentru a controla motoarele in asa fel incat sa urmareasca dunga neagra.
Daca senzorii din dreapta detecteaza dunga, inseamna ca masina va trebui sa vireze la dreapta pentru a urmarii dunga, pentru aceasta motorul din stanga va trebui sa mearga in timp ce motorul diin dreapta sa se opreasca (sau eventual sa mearga in directia opusa pentru a permite un vriaj mai strans). Idem pentru cazul in care senzorii din stanga detecteaza dunga.
Cand senzorii din centru detecteaza dunga, masina este pe directia buna si ambele motoare merg normal.
Hardware Design
Lista piese Placuta PM 2015
- Microcontroller ATMEGA 324PA-PU
- Soclu microcontroller
- Quartz 16MHz
- Condensator 10uF
- Condensator 100nF
- Condensator 15pF
- Rezistenta 10K
- Rezistenta 1K
- Rezistenta 0.1K
- Rezistenta 2K2
- Dioda Zener
- Led 3mm
- Set 10 pini conector port
- Push button
- Stabilizator de tensiune 7805CT
- Mufa USB tipB
- Mufa alimentare 12V
- PCB PM 2015
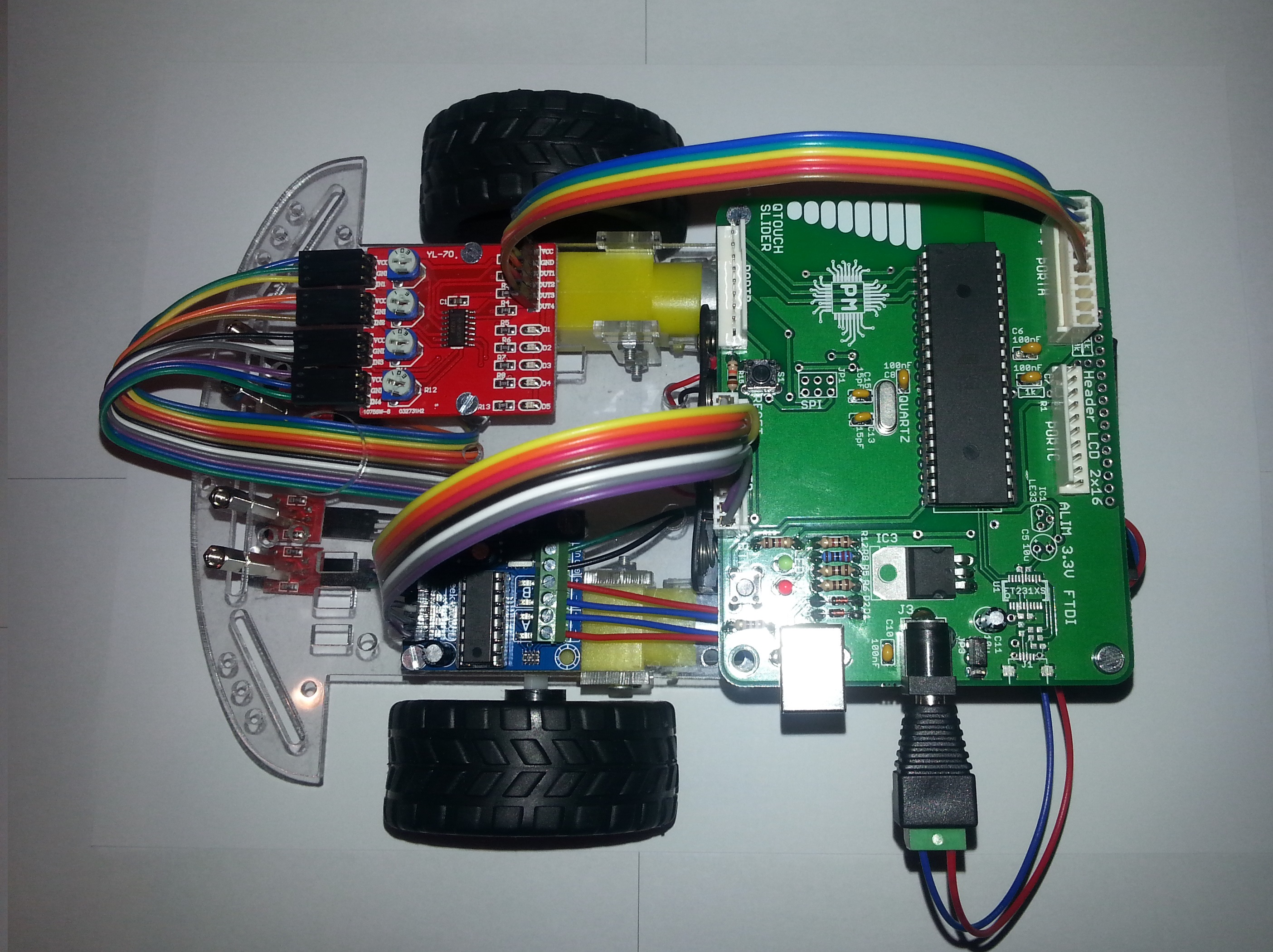
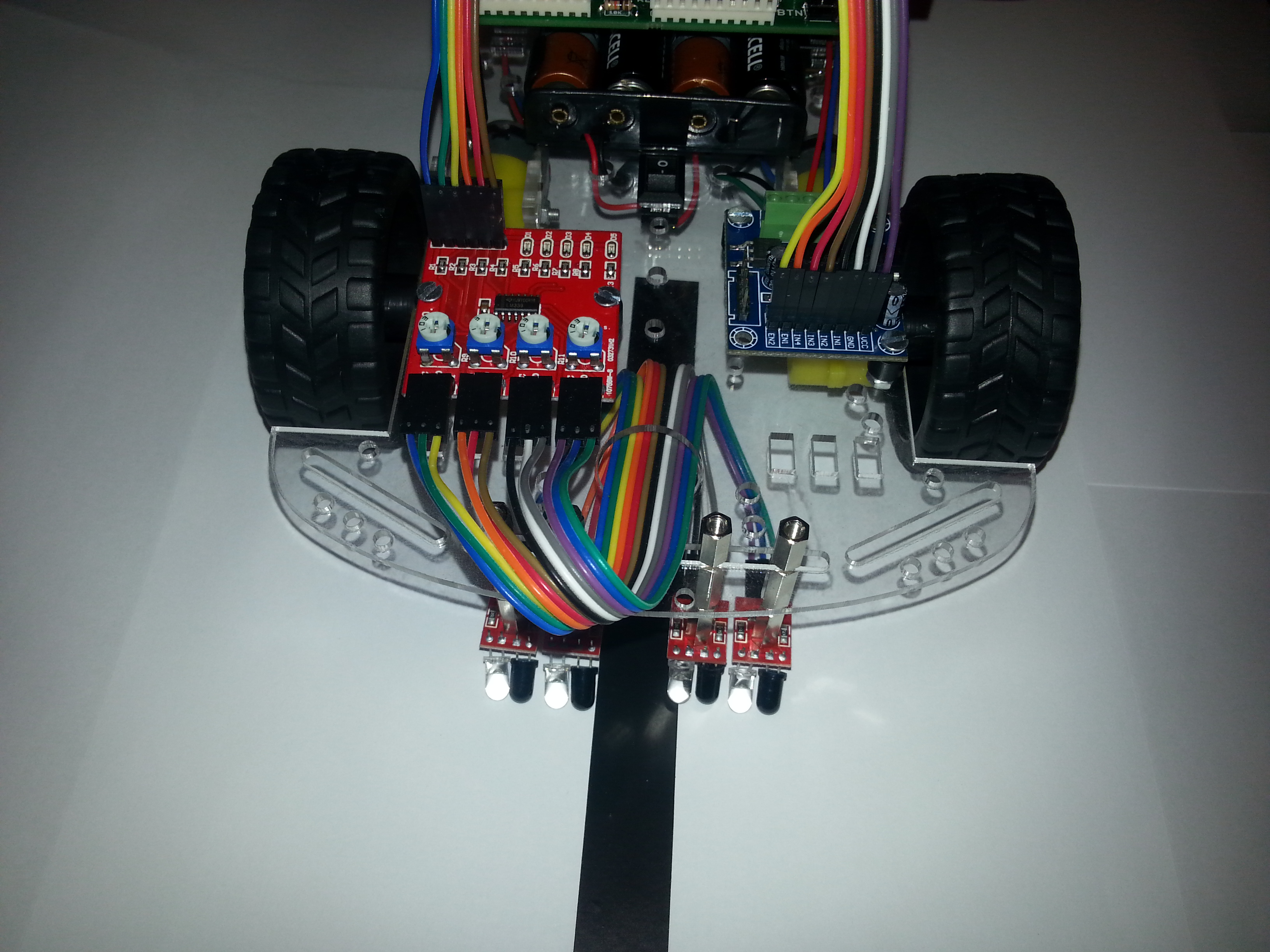
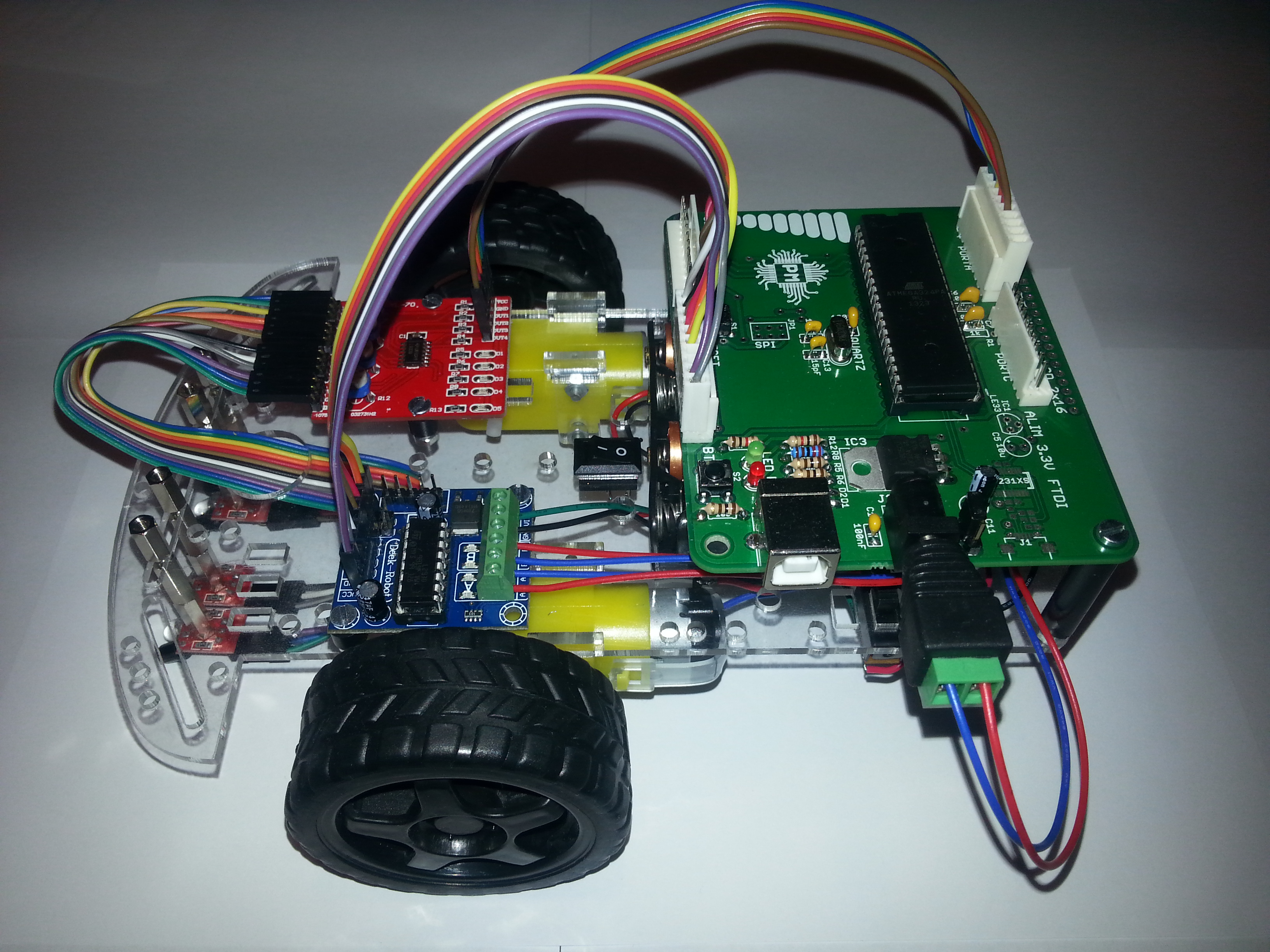
Lista piese robot
- Placuta PM 2015
- Sasiu line follower - link http://tinyurl.com/ohq2esv
- Detector infrarosu (cu 4 senzori) - link http://tinyurl.com/nck3z9p
- Driver motoare - link http://tinyurl.com/n9v4ap8
- Suport baterie (4 x 1,5V)
- Suport baterie (9V)
- Fire conector terminal mama-mama
Schema electrica

Software Design
Mediul de dezvoltare folosit a fost editor de text - Notepad++ , pentru a crea fisierul .hex am folosit WinAvr si pentru a incarca fisierul .hex pe proceosr am folosit BootloaderHID.
Am implementat PWM pentru a putea controla turatia motoarelor, daca motoarele ar fi fost conectate direct la sursa ar fi mers prea repede, ne putant urmarii linia. Astfel folosind PWM am redus turatia pentru a merge mai incet si pentru a putea vira si urmarii linia cat mai precis.
Rezultate Obţinute
In final am obtinut un LineFollower care poate urmarii linia :)
Concluzii
A fost un proiect foarte interesant care ne-a dat ocazia sa construim un robot de la 0.
In primul rand construirea placutei pentru etapa 1 a fost foarte educativ, intelegand rolul fiecarei componente de pe placuta.
Construirea robotului a fost deasemenea distractiva si ne-a invatat ca pentru ceva care se misca trebuie avut grija ca toate componentele sa nu se loveasca intre ele si sa ramana pe robot pe durata folosirii.