Table of Contents
Flavius-Costin TÎRNĂCOP & Irina GOȘU - Minisumo
Autorul poate fi contactat la adresa: Login pentru adresa
Introducere
Proiectul consta intr-un robot ce se incadreaza in categoria Minisumo in cadrul concursului Robochallenge. Robotul este complet autonom si are ca scop cautarea si scoaterea unui robot advers dintr-un ring numit Dohyo. Suprafata de joc este definita ca un disc de culoare neagra cu diametrul de 77 cm delimitat de o bandă albă cu latimea de 2.5 cm. Meciul începe la semnalul de start al arbitrului de la telecomandă şi continuă până când unul dintre cei 2 roboţi obține 2 puncte “Yuhkoh”. Arbitrul desemnează câștigătorul meciului.
Robotul a fost realizat cu sprijinul laboratorului EAPInGear

Descriere generală
Mai jos am atasat o schema generala a design-ului intern al robotului. Vom descrie diagrama din exterior in interior:
- senzorii de linie si senzorii de lateral se alimenteaza direct din regulatorul de 5V de pe Baby Orangutan si dau date despre mediu microcontrollerului.
- senzorii din fata se alimenteaza la o tensiune de minim 12V din circuitul de boost. De asemenea ei se leaga la microcontroller pentru citire.
- circuitul de boost ridica tensiunea bateriei de 7.4V (2 celule Li-Po) la 12V necesari senzorilor de linie.
- senzorul de Start/Stop se alimenteaza din regulatorul de 5V de pe Baby Orangutan microcontrollerului.
- driverul de motoare este legat la motoare si la baterie pentru a facilita controlul acestora
- bateria alimenteaza circuitul de boost, microcontrollerul si motoarele

Hardware Design
Lista Piese
| Piese | Nr | Pret |
|---|---|---|
| Baby Orangutan (Atmega 328) | 1 | 90 RON |
| Roti Minisumo | 2 | 60 RON |
| Motoare 50:1 | 2 | 50 RON |
| Boost Regulator (Pololu) | 1 | 50 RON |
| Senzori Linie | 2 | 50 RON |
| Senzori Lateral (Sharp 40cm) | 2 | 60 RON |
| Senzori Fata (Banner Engineering 150cm) | 2 | Very Expensive |
| Senzor Start/Stop | 1 | 25 RON |
| Dip switch | 1 | Found |
| Li-Po Battery 2 cell (800mAh) | 1 | 40 RON |
| Bodywork | 1 | Cheap |
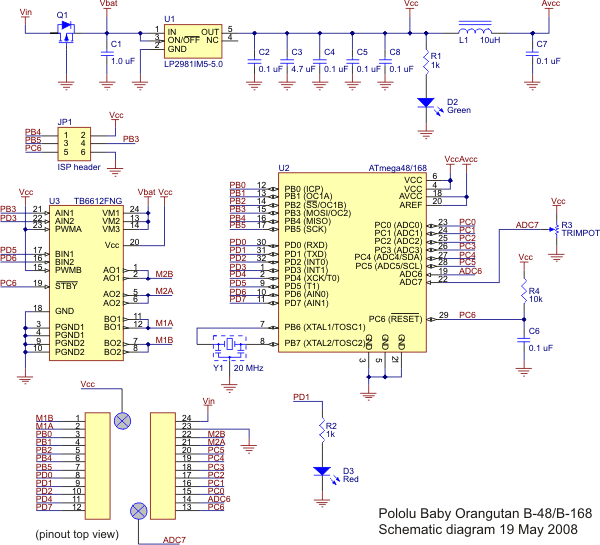
Scheme interfatare senzori-microcontroller




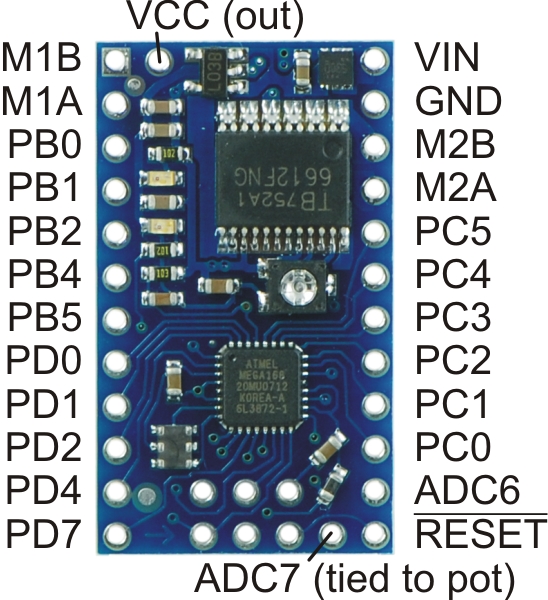
Schema/Board Microcontroller - Baby Orangutan:
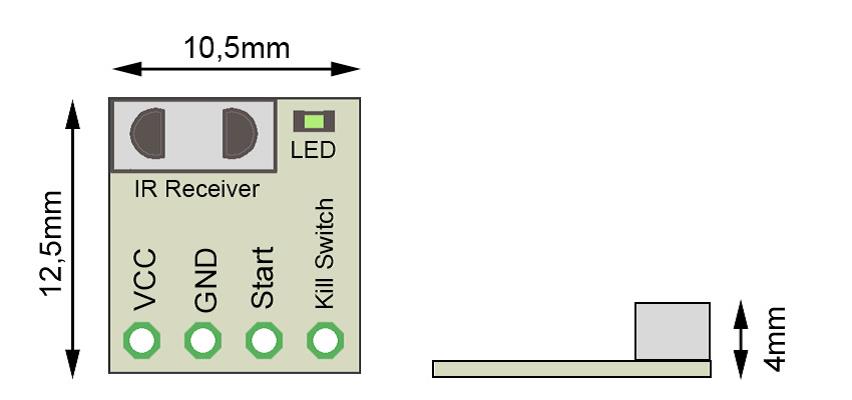
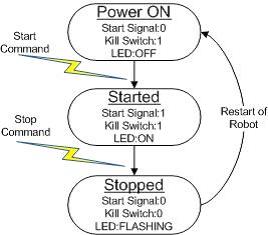
Sensor oficial competitie Start/Stop
Alte componente





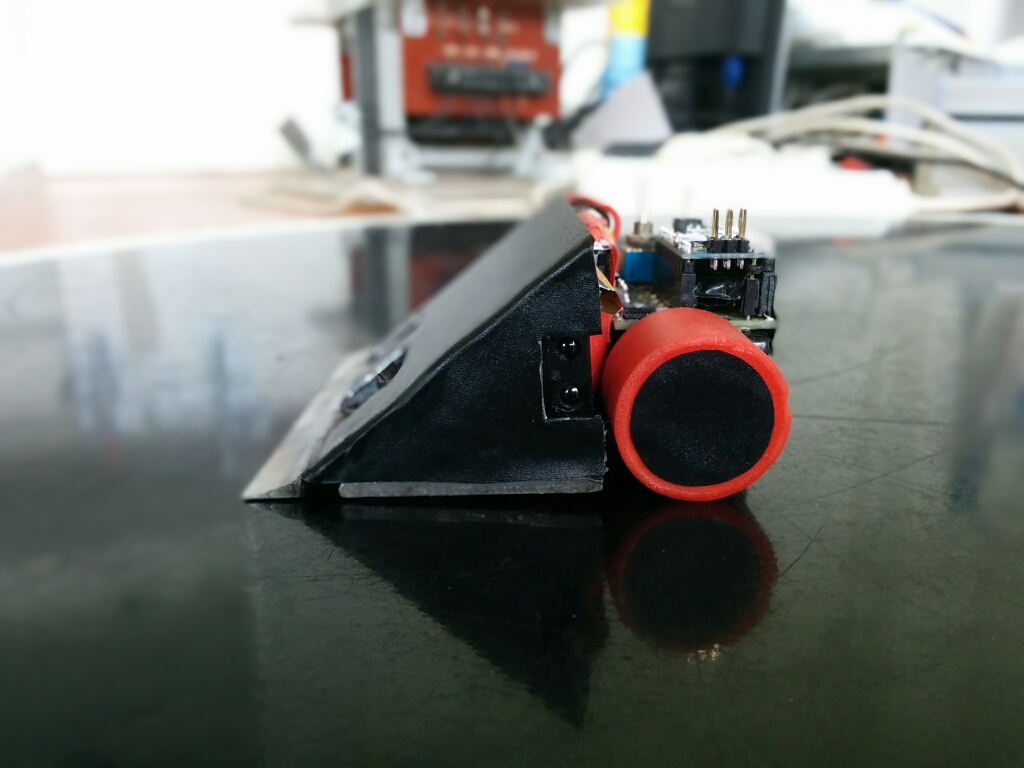
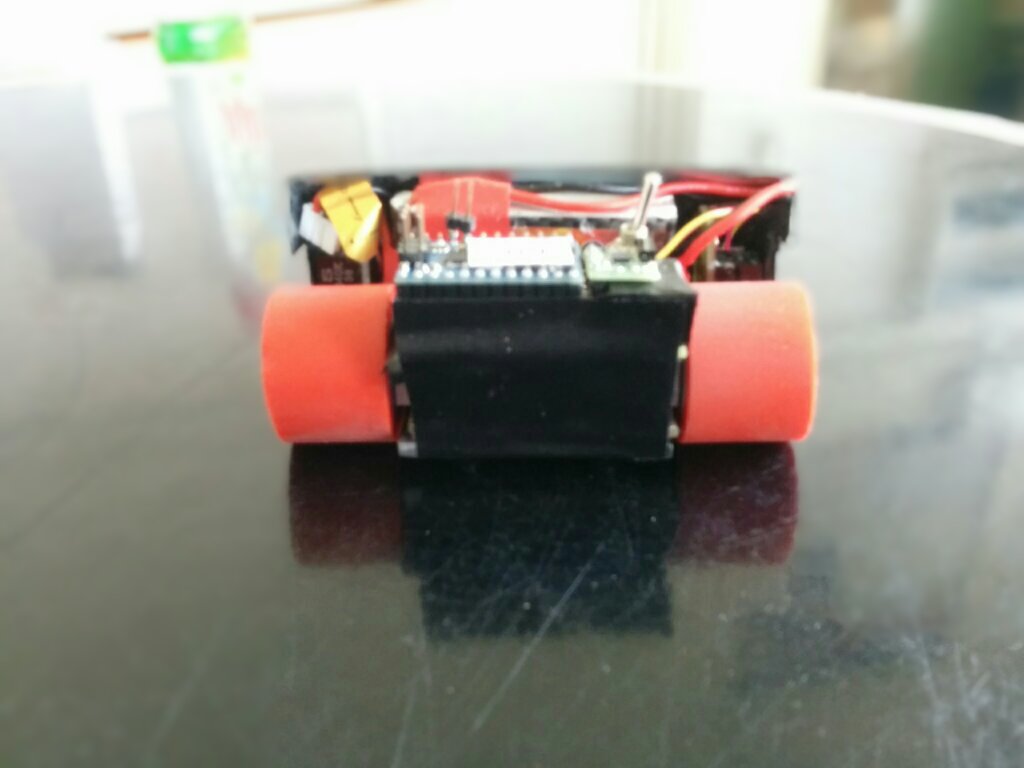
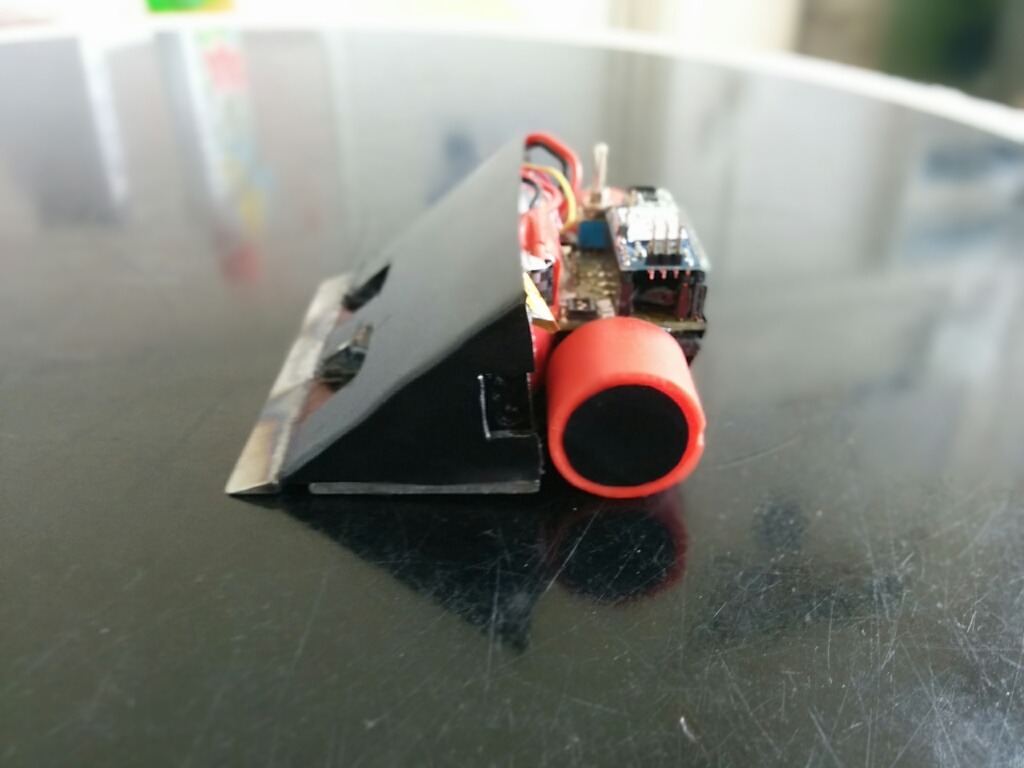
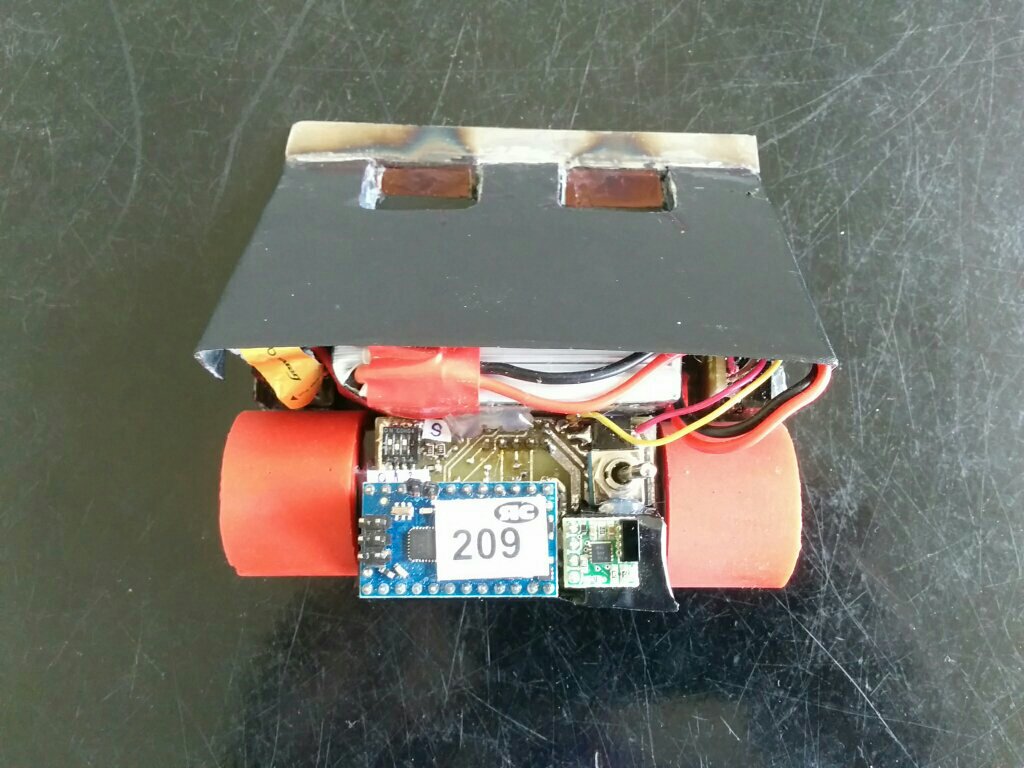
Poza cu robotul in starea finala

Teste robot
Software Design
Deoarece avem o istorie de aproape doi ani de participari la concursuri asemanatoare si suntem deja la a 4-a editie a Robochallenge, ne dorim sa participam in continuare si in viitor. Asadar pe partea de software codul nu va putea fi impartasit intrucat este secret si ar oferi un avantaj competitorilor nostri.
Vom descrie insa schema bloc a algoritmului de baza ce sta in spatele unui robot de minisumo.La baza un robotul are un automat cu stari ce intai evalueaza inputul de la senzori si in functie de asta ia decizii in controlul motoarelor. Citirile de la senzori sunt evaluate in functie de prioritatea lor, intai cei de linie (este iminent sa nu ies din ring), apoi cei din laterale (adversarul este aproape de mine) si in cele din urma cei din fata (am gasit adversarul si il atac).

Rezultate Obţinute
In urma concursului Robochallenge (faza locala) echipa noastra a obtinut locul 3 dintr-un total de 15 echipe.





Concluzii
Desi robotul s-a comportat per total bine am ajuns la urmatoarele concluzii:
Trebuie sa reverificam pozitionarea senzorilor si datele citite de acestea. Uneori robotul parea ca vede ceva desi nu ar fi trebuit.
De asemenea vor trebui reverificate strategiile de lupta.
Bibliografie/Resurse
Microcontroller - http://www.pololu.com/product/1220/
Senzor Lateral - http://sharp-world.com/products/device/lineup/data/pdf/datasheet/gp2y0d340k_e.pdf
Senzori linie - https://www.sparkfun.com/products/9453
Senzori fata - http://www.bannerengineering.com/en-US/