Table of Contents
Laurenţiu - Marian NEAGU, Mihai NENECIU- Line follower
Autorii pot fi contactati la adresele: laurentiu.neagu@cti.pub.ro sau mihai.neneciu@cti.pub.ro
Introducere
Proiectul constă în realizarea unui line follower. Robotelul pe care il vom crea va avea ca scop principal urmarirea unei linii negre. Motivul pentru care am ales acest proiect a fost pentru ca ni s-a părut foarte atractivă realizarea unui robot care să se deplaseze singur în funcție de niste conditii pe care i le setam, asadar o combinatie intre crearea de la 0 a unui robotel impreuna cu programarea efectiva a unui microcontroller.
Descriere generală
Schema bloc
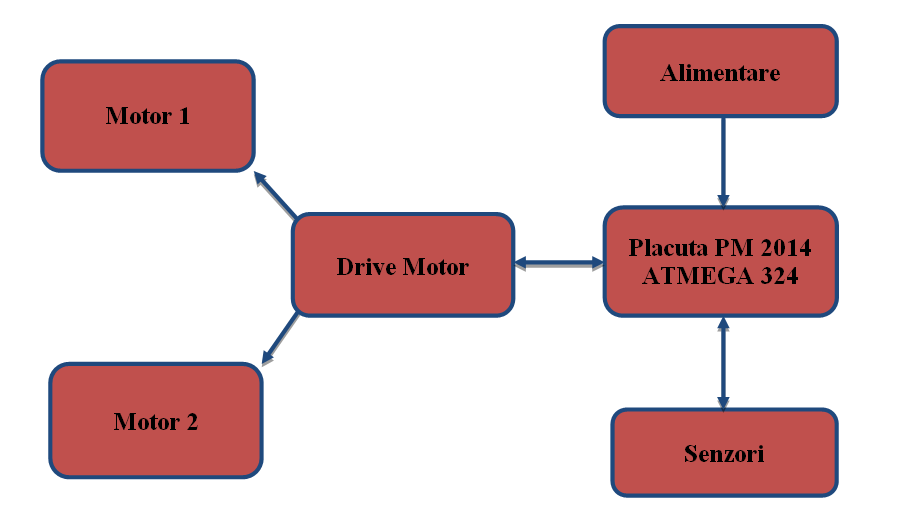
Hardware Design
Componentele folosite la construirea line-followerului sunt:
placa de bază cu Atmega324A - componenta centrala care primeste informatiile de la senzori si comanda motoarele astfel incat robotul sa urmareasca traseul
bară senzori QTR-8A
kit șasiu + motoare de curent continuu 120:1
driver de motor L298N pentru comandare motoare
diode 1N4007
condensator 1000µF 35V
alte componente:
barete mamă pentru porturile de pe placa de bază
conector baterie 9V
fire de legătură, fire-panglică
distanțiere,șuruburi,piulițe M3,etc pentru montare component
Prețul total al componentelor a fost de aproximativ 220RON.
Schema electrica:

Software Design
- WinAVR
- Programmer's Notepad IDE
- bibliotecile specifice
- HIDBootFlash
Algoritmul folosit: inputul se primeste de la bara de senzori, cu ajutorul acestuia se controleaza miscarea motoarelor astfel incat centrul barei de senzori sa stea tot timpul in dreptul liniei negre. La abateri ale robotului intr-o directie, motorul din directia respectiva se va opri si se va declansa celalalt astfel incat sa se readuca pe drumul corect
Rezultate Obţinute


Un live demo al robotelului la intalnirea cu scopul prezentarii proiectelor de PM in hol rectorat:
Concluzii
Un proiect interesant, am avut multa libertate din punctul de vedere al “how to do stuff”, de asemenea am putut folosi cunostintele din cadrul laboratorului de PM. Concluzia: Hardware engineers we are!
Download
Arhiva se va descarca de aici
Jurnal