Table of Contents
LINE FOLLOWER
Autorii pot fi contactati la urmatoarele adrese de mail:
gabriel.popescu@cti.pub.ro
tiberiu.scarlat@cti.pub.ro
Introducere
Proiectul consta in realizarea unui 'Line follower', mai exact un robot care se deplaseaza pe o suprafata plana si urmareste o linie neagra pe un fundal alb.
Am ales aces proiect deoarece ni s-a parut intersant sa construim ceva ce se misca singur, in functie de date primite de la niste senzori.
Descriere generală
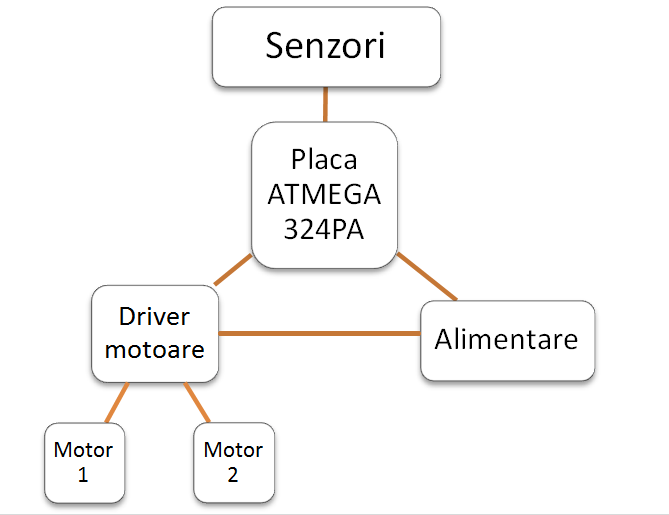
Robotul functioneaza in modul urmator : Senzorii transmit date in functie de pozitia liniei negre pe care robotul o urmareste. In urma procesarii acestora, microprocesorul trimite comenzi driverului de motoare, ce controleaza mai departe cele doua motoare, punand robotul in miscare.
Schema bloc:
Hardware Design
Lista de piese:
1. Kit Robot Magician http://www.robofun.ro/platforma-magician-robot-kit?category_id=0

2. Bara senzori linie analogic QTR-8A http://www.robofun.ro/senzori/infrarosu/bara_senzori_linie_qtr_8a

3. Integrat L298N / Driver motoare: http://www.robofun.ro/L298N
4. Placa PM2014 cu ATMEGA324PA
5. Baterii + conectori
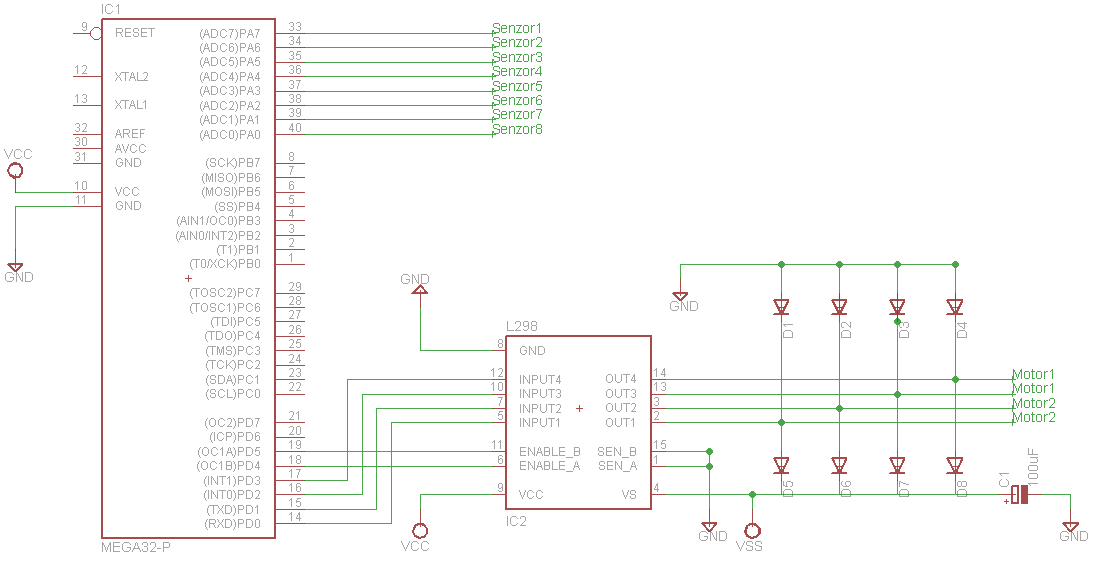
Schema electrica:
Placuta PM2014:
Componente:
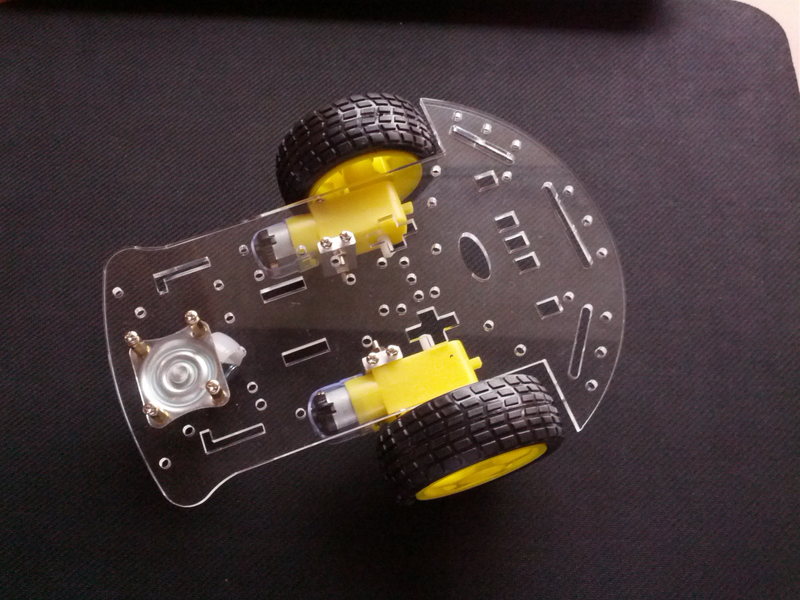
Kit robot asamblat:
Software Design
Mediu de dezvoltare
- Programmer's Notepad
Descriere algoritm
- Programul contine urmatoarele functii:
- init() - sunt initializate pinii de input,output si PWM-ul;
- move() - in aceasta functie sunt setate viteza motoarelor;
- main() - cu ajutorul informatiilor primite de la senzori se aplica functia move, toate acestea fiind incluse intr-un while;
Rezultate Obţinute
Concluzii
Download
Fişierele se încarcă pe wiki folosind facilitatea Add Images or other files. Namespace-ul în care se încarcă fişierele este de tipul :pm:prj20??:c? sau :pm:prj20??:c?:nume_student (dacă este cazul). Exemplu: Dumitru Alin, 331CC → :pm:prj2009:cc:dumitru_alin.
Jurnal
Bibliografie/Resurse