Table of Contents
Line Follower
Introducere
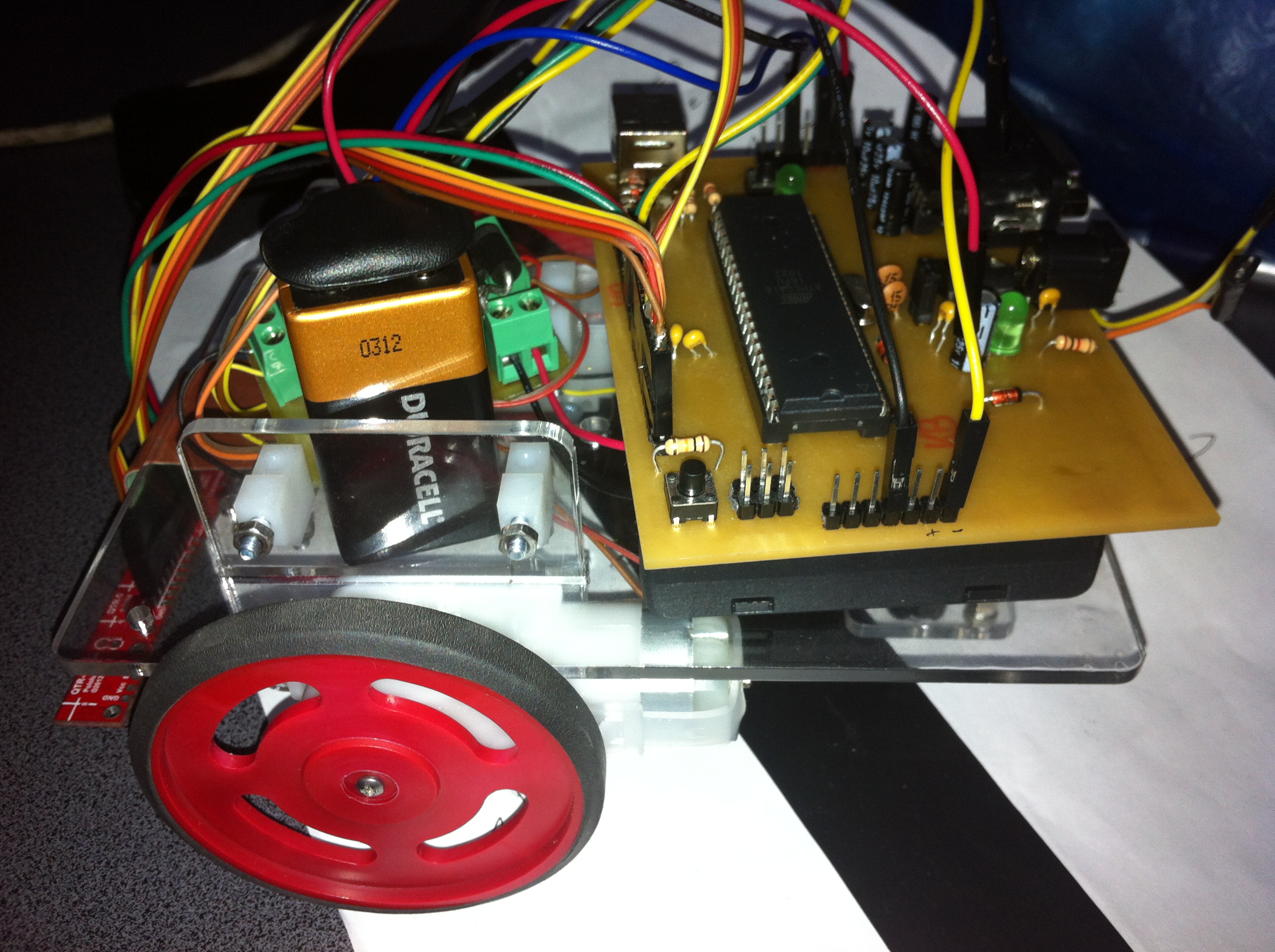
Un robot care urmareste o linie neagra pe un traseu oarecare. Utilizand senzori si procesorul ATMega16, se transmit in mod separat voltaje diferite la motoare in functie de directia in care trebuie sa mearga robotul/merge traseul.
Descriere generală
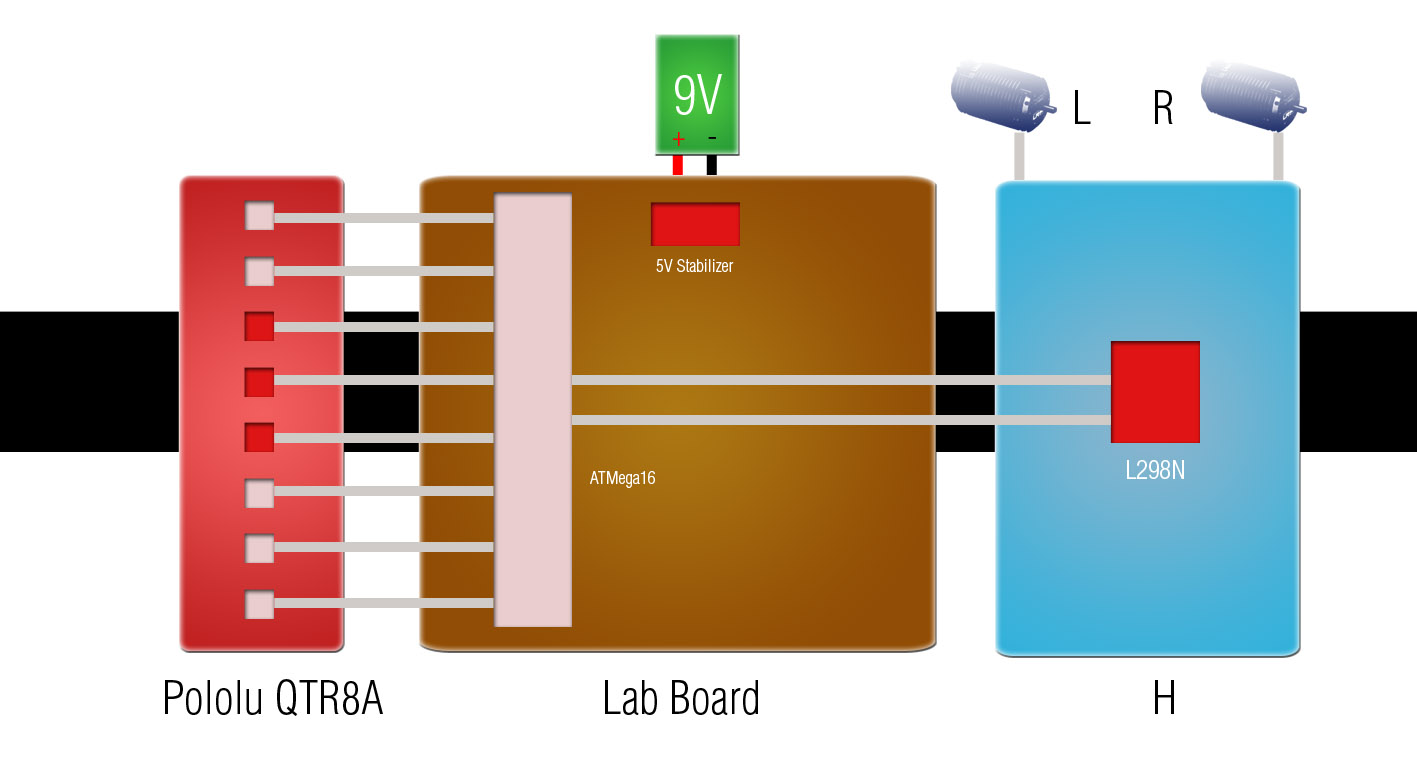
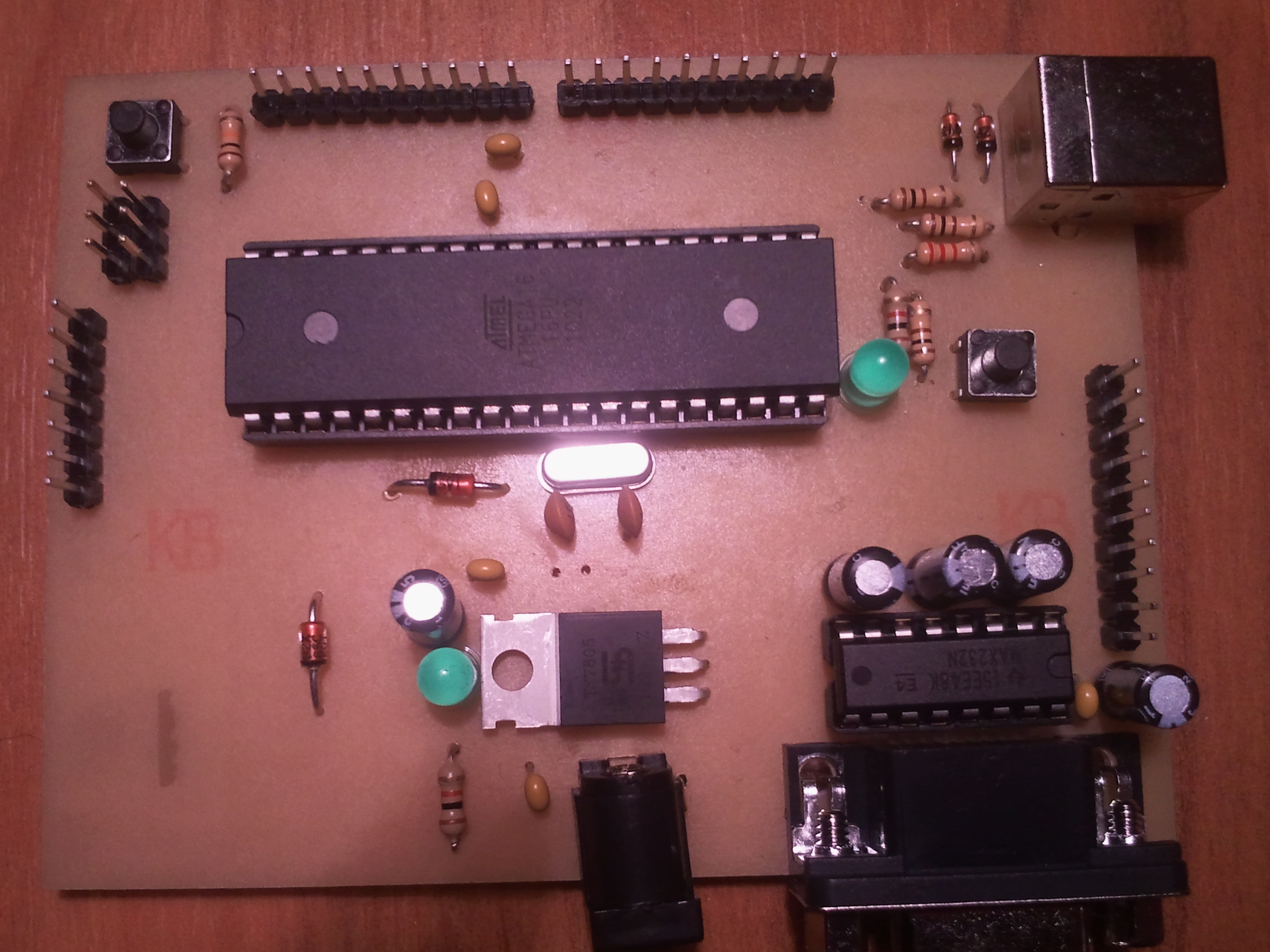
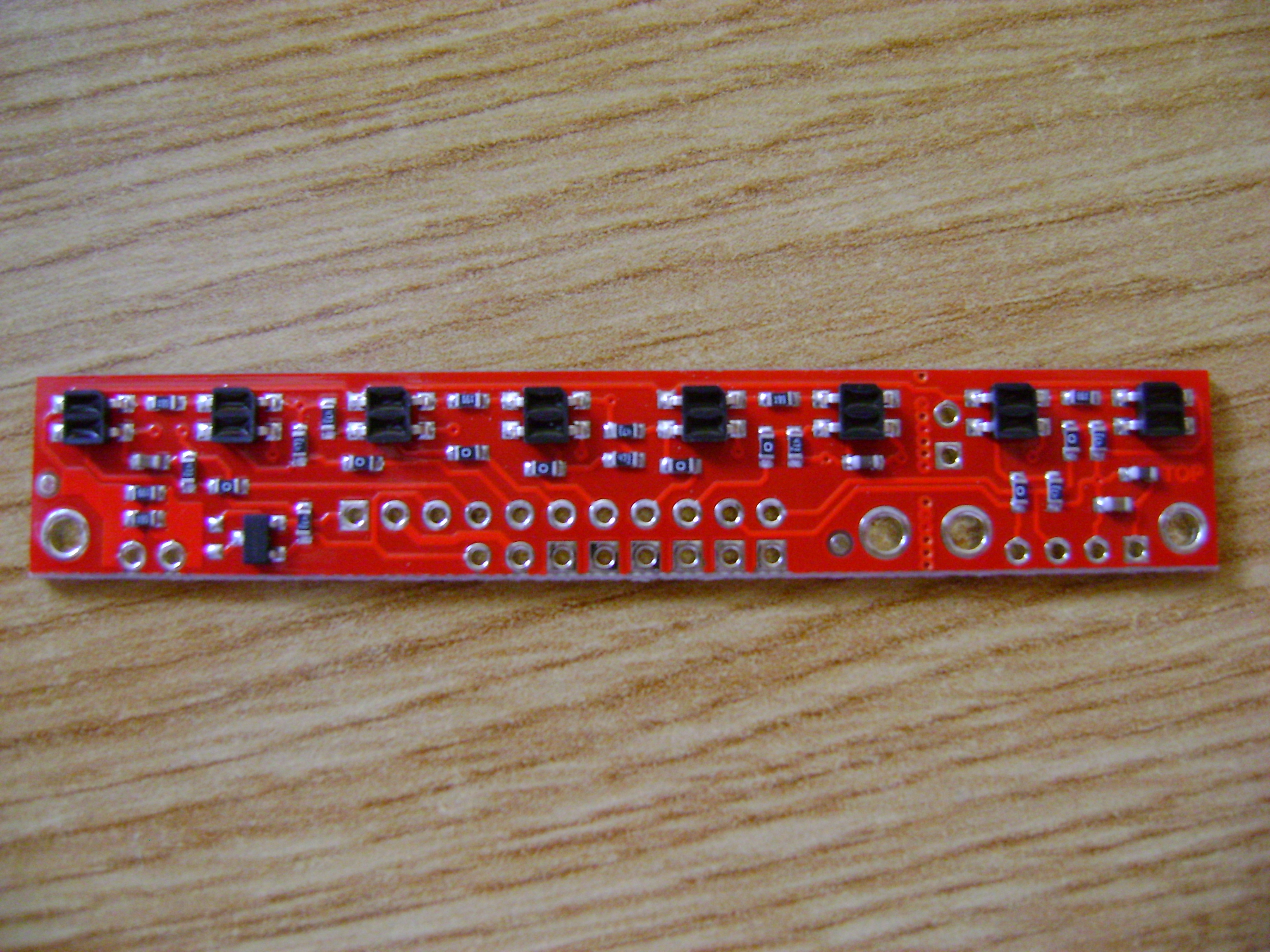
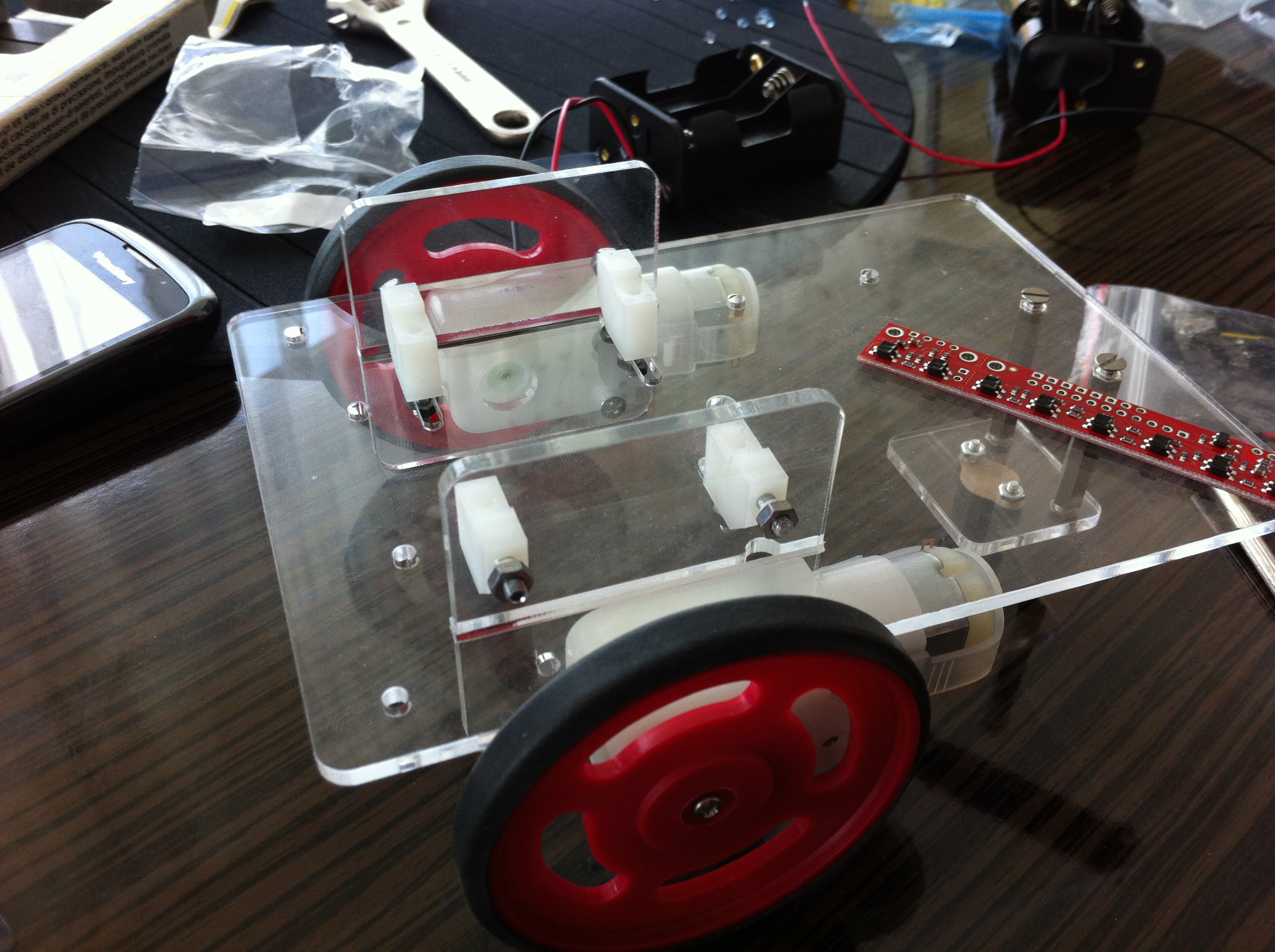
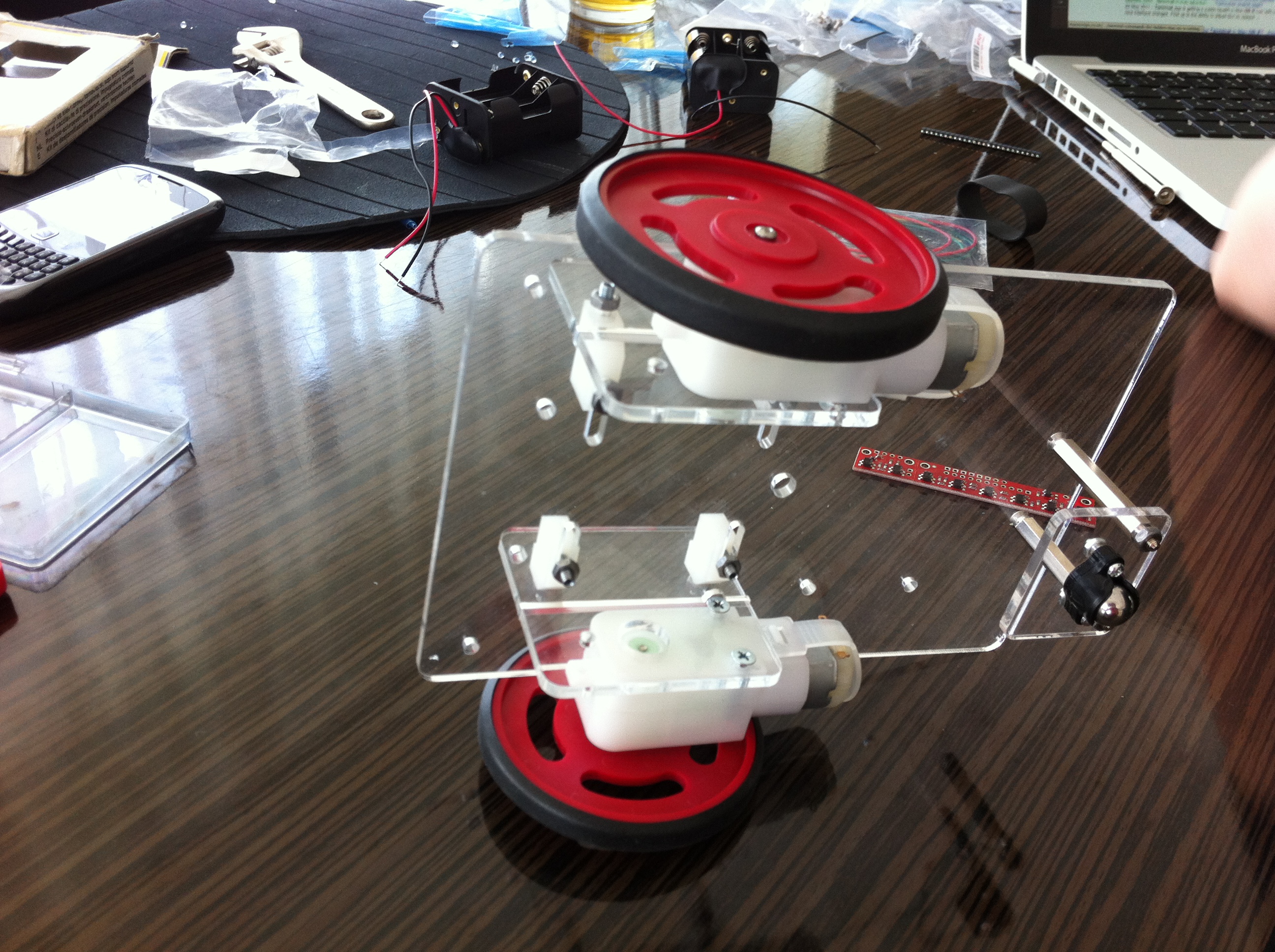
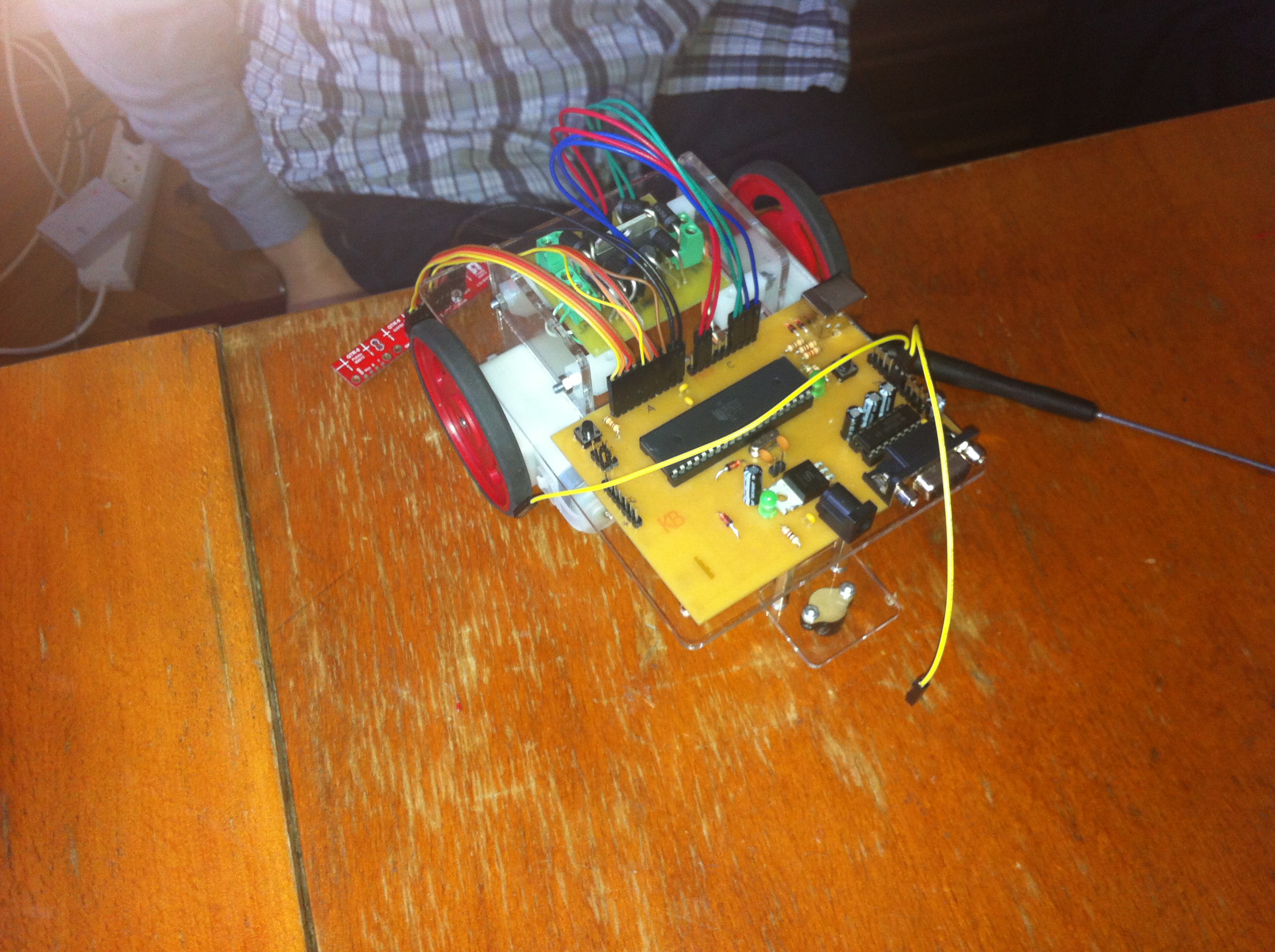
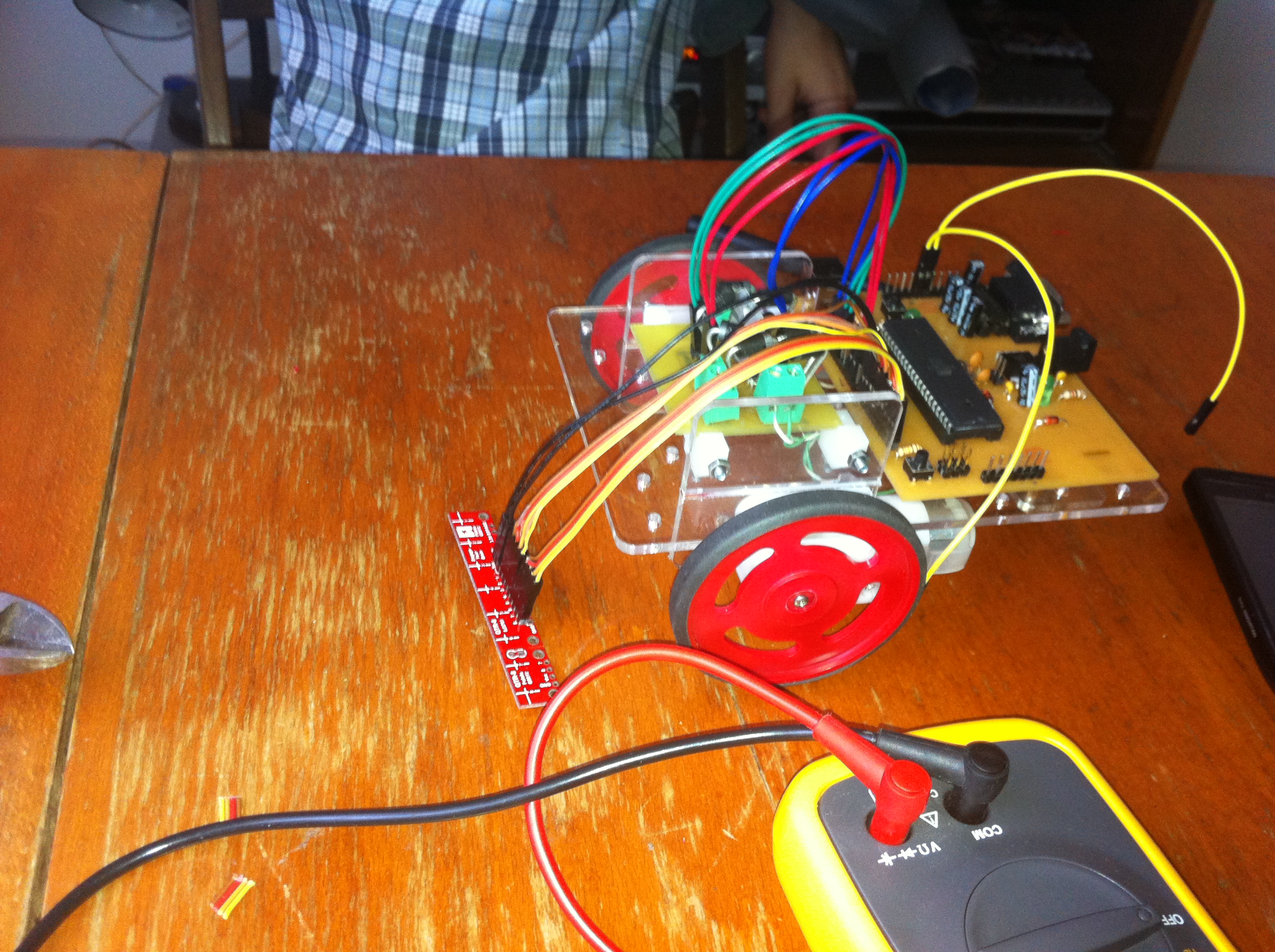
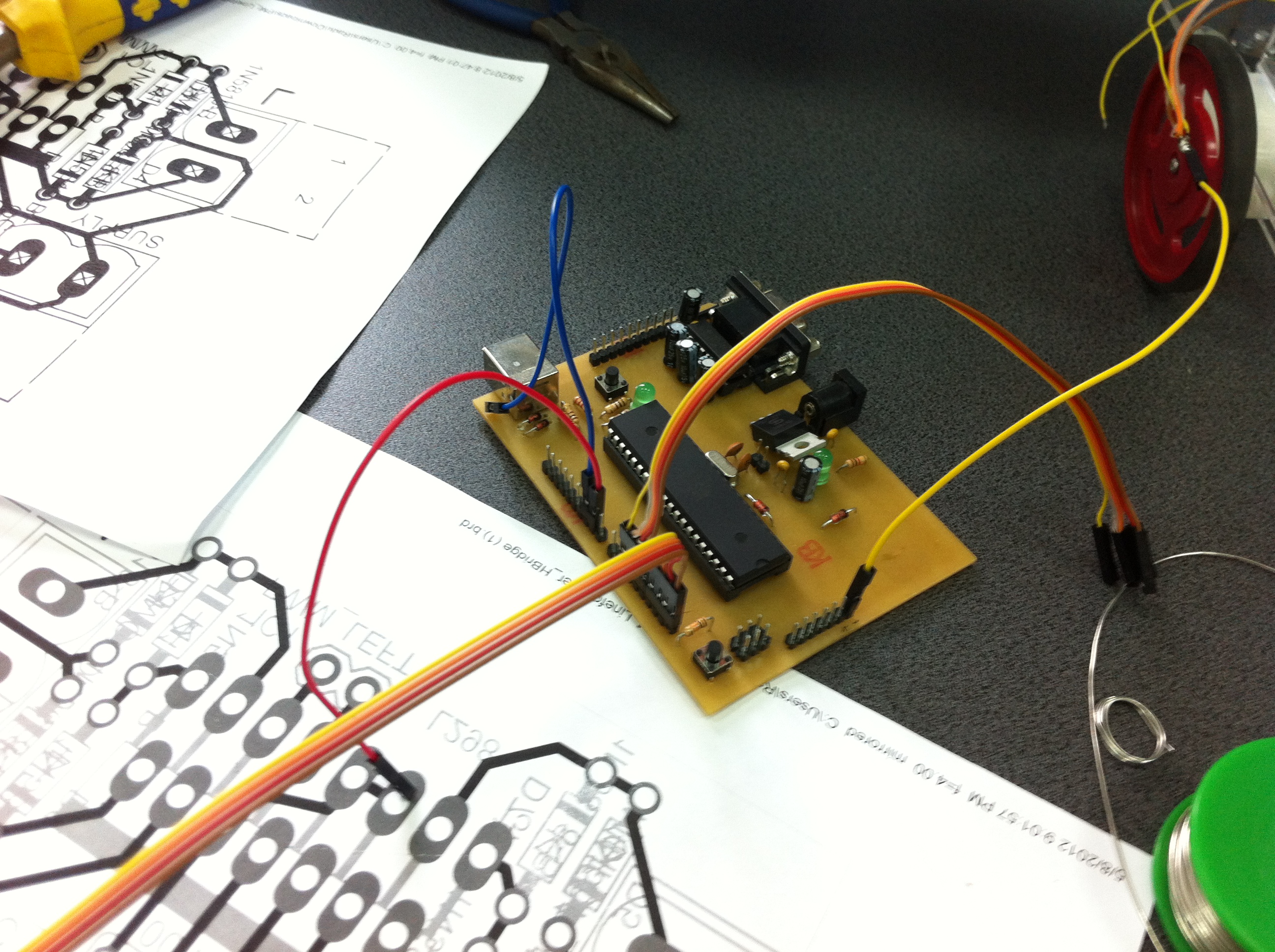
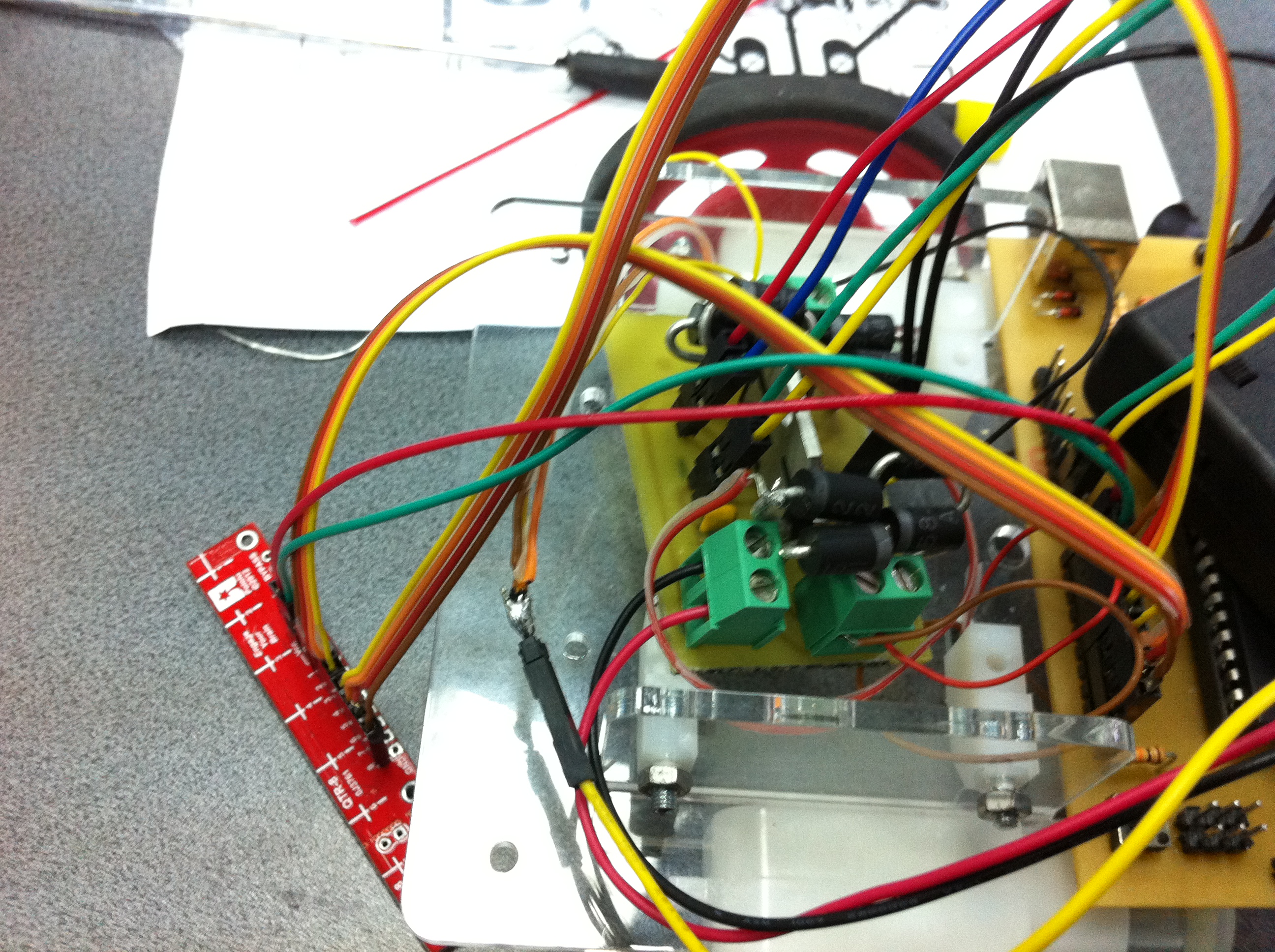
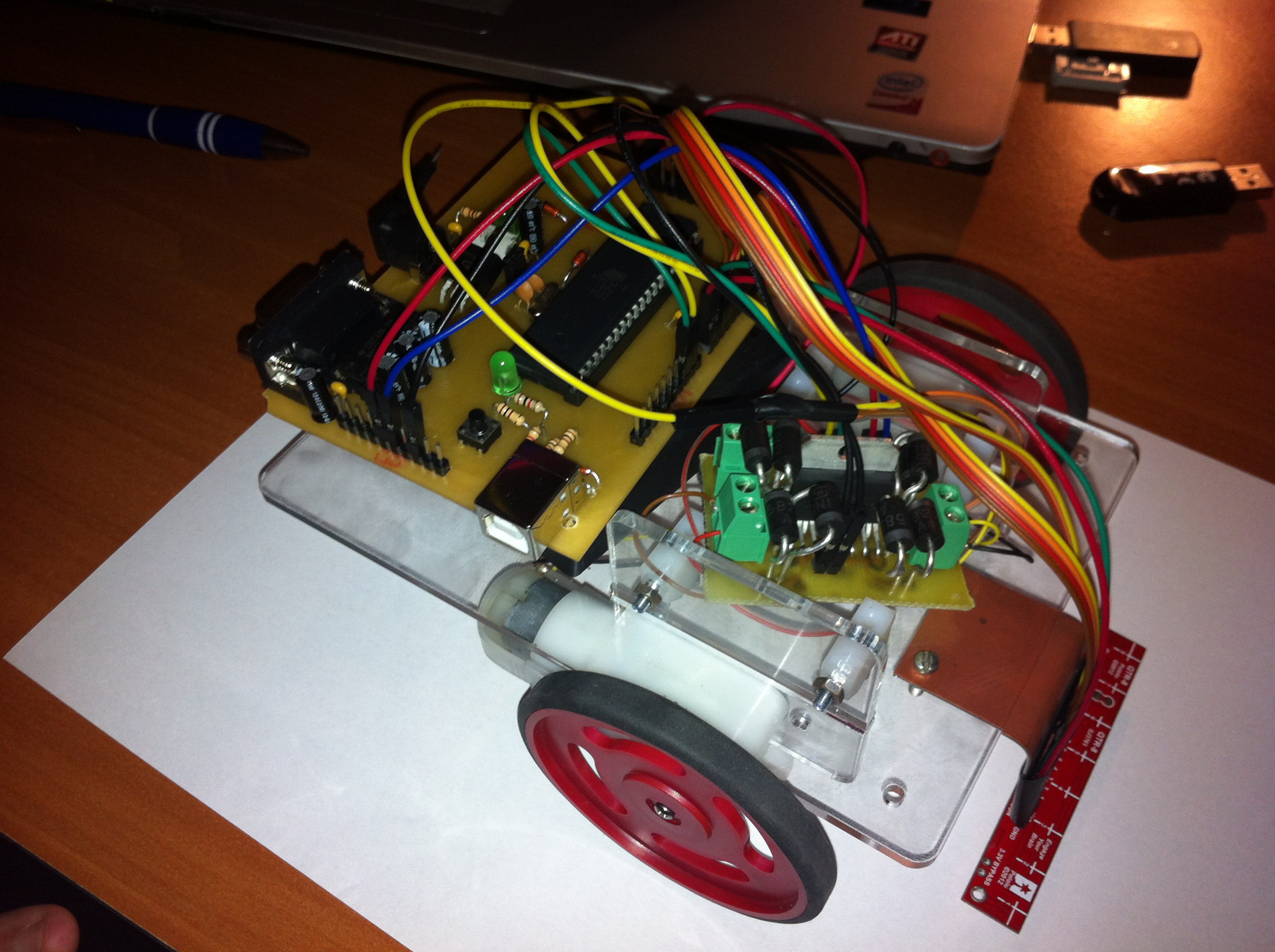
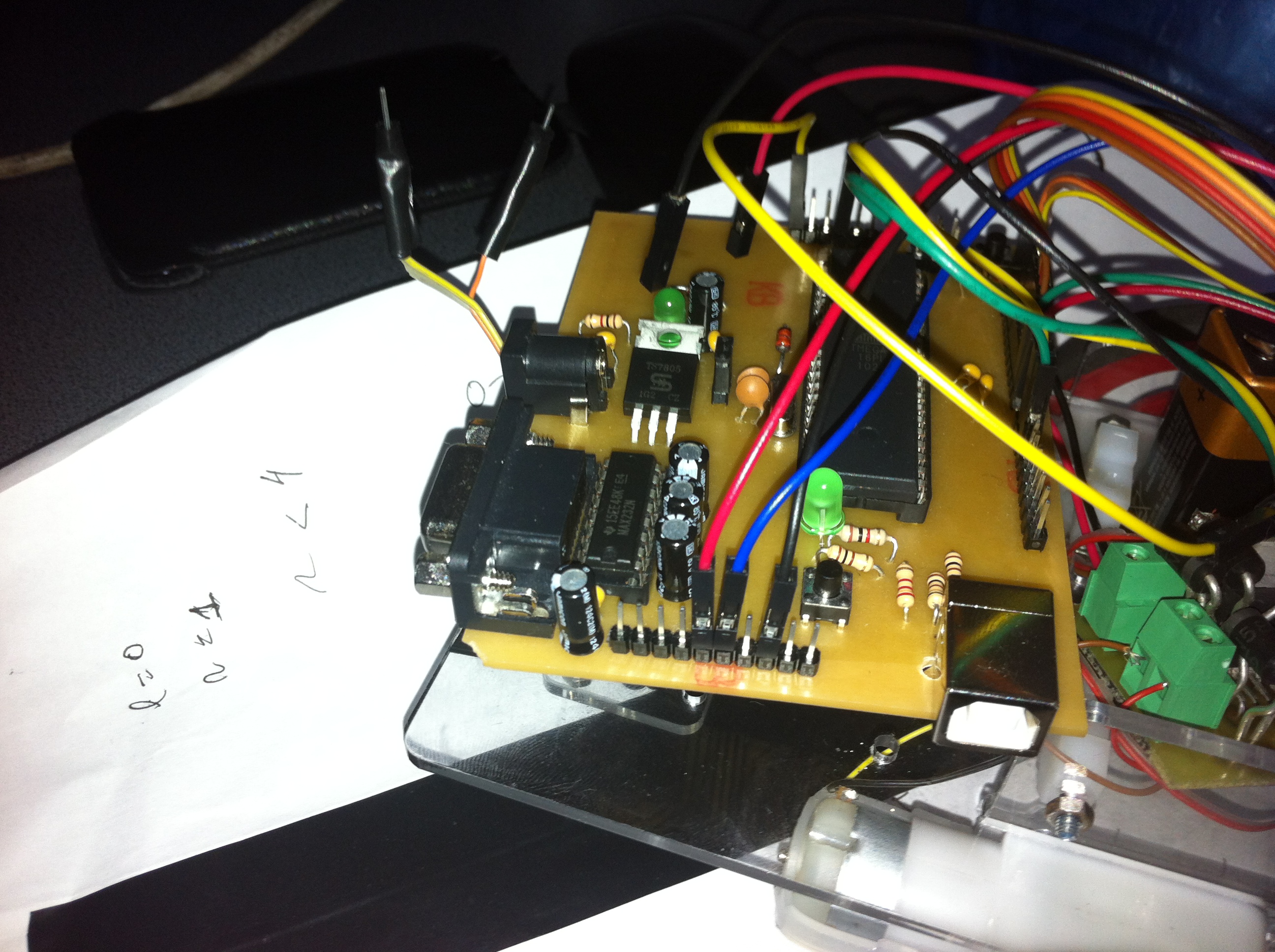
Proiectul utilizeaza placa din prima etapa a laboratorului de PM. In plus, un sensor array IR QTR8A Pololu, si o placa suplimentara care contine driver-ul L298N.
Hardware Design
Piese utilizate:
- Placuta laborator
- Sensori QTR98A
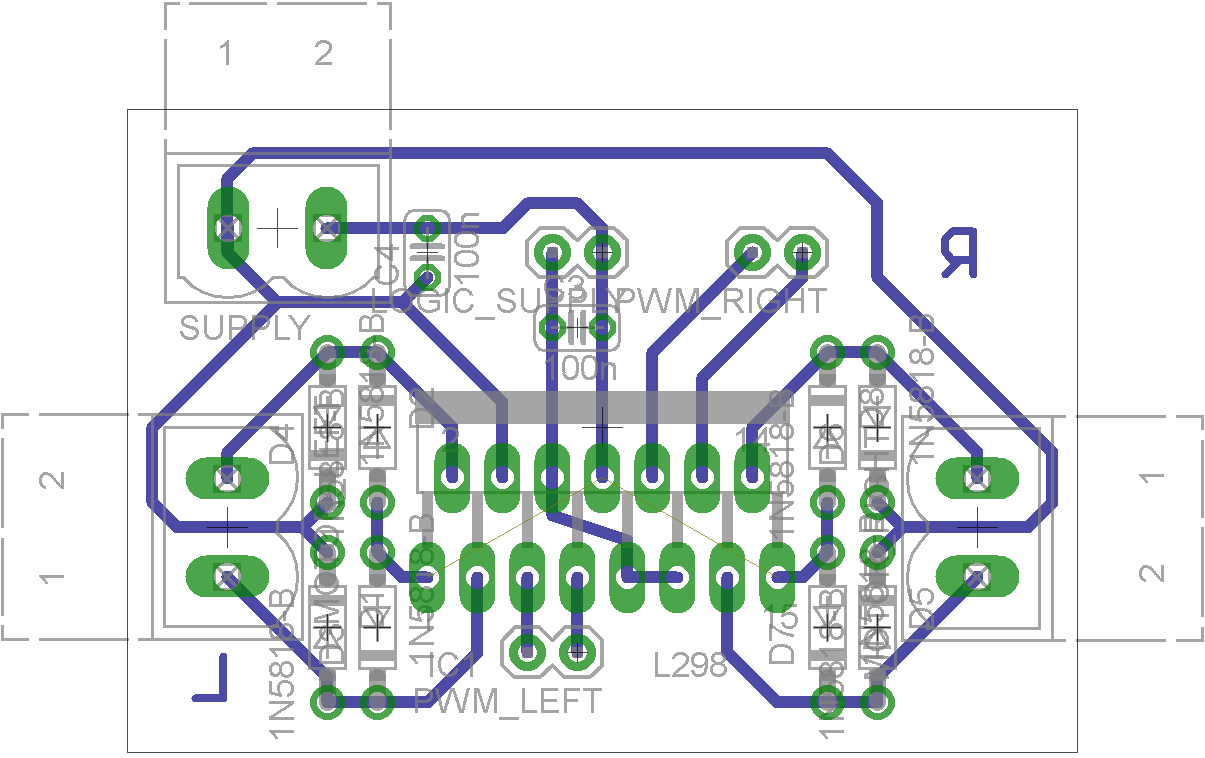
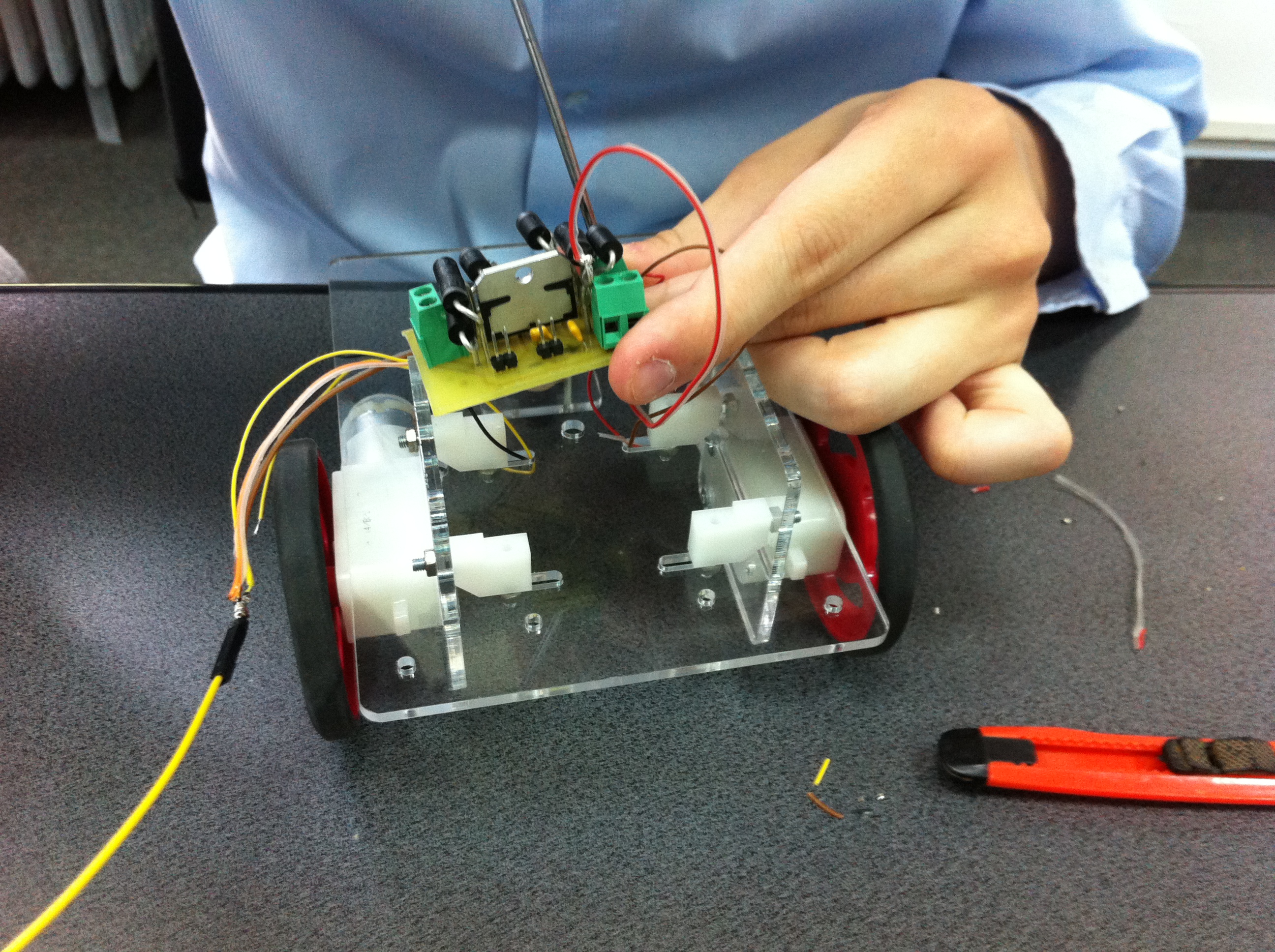
- L298N
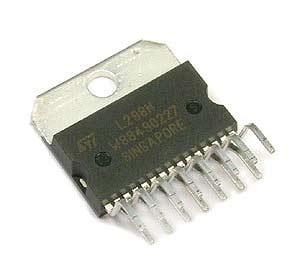
- Schema Punte H
Software Design
Descrierea codului aplicaţiei (firmware):
- mediu de dezvoltare (if any) (e.g. AVR Studio, CodeVisionAVR)
- librării şi surse 3rd-party (e.g. Procyon AVRlib)
- algoritmi şi structuri pe care plănuiţi să le implementaţi
- (etapa 3) surse şi funcţii implementate
}
Rezultate Obţinute & WIP




Line Follower in jurul unei camere - viteza foarte mica a rotii opuse
Rezultatul algoritmului de recuperare - viteza mare a rotii opuse
Line Follower in jurul unei camere - viteza mare (maxima chiar :)) )
Concluzii
Download
O arhivă (sau mai multe dacă este cazul) cu fişierele obţinute în urma realizării proiectului: surse, scheme, etc. Un fişier README, un ChangeLog, un script de compilare şi copiere automată pe uC crează întotdeauna o impresie bună ![]() .
.
Fişierele se încarcă pe wiki folosind facilitatea Add Images or other files. Namespace-ul în care se încarcă fişierele este de tipul :pm:prj20??:c? sau :pm:prj20??:c?:nume_student (dacă este cazul). Exemplu: Dumitru Alin, 331CC → :pm:prj2009:cc:dumitru_alin.
Jurnal
- Gandire la Line Follower
- Cautare kit robot pe robofun
- Amanare cumparare kit robot
- Scotere kit robot bun, introducere kit robot mai slab si mai scump <pe robofun>
- Comanda kit robot
- Preluare kit robot robofun la ora 22:30 + achizitionare 10 fire mama-pin/tata-pin @ 15 RON
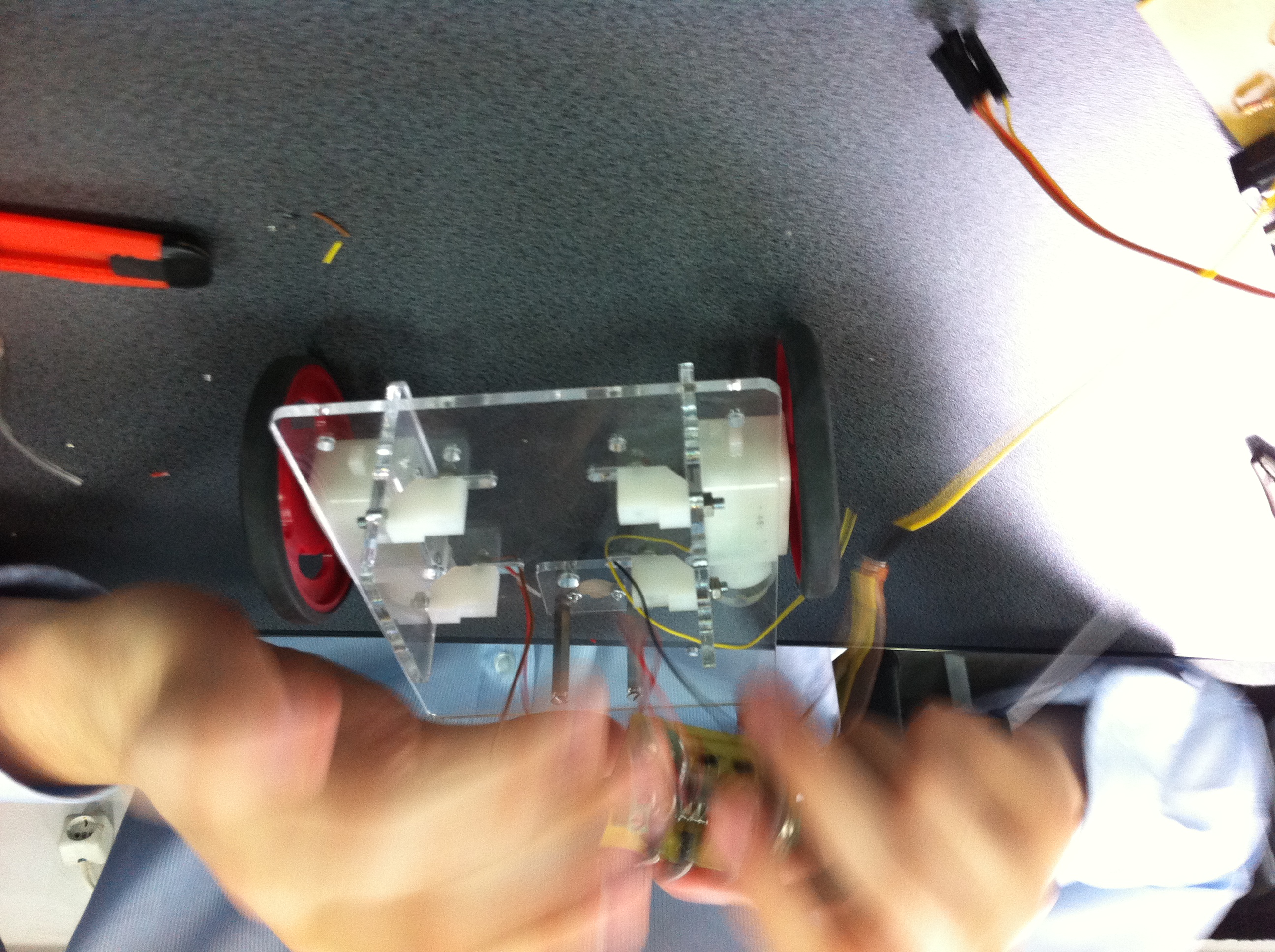
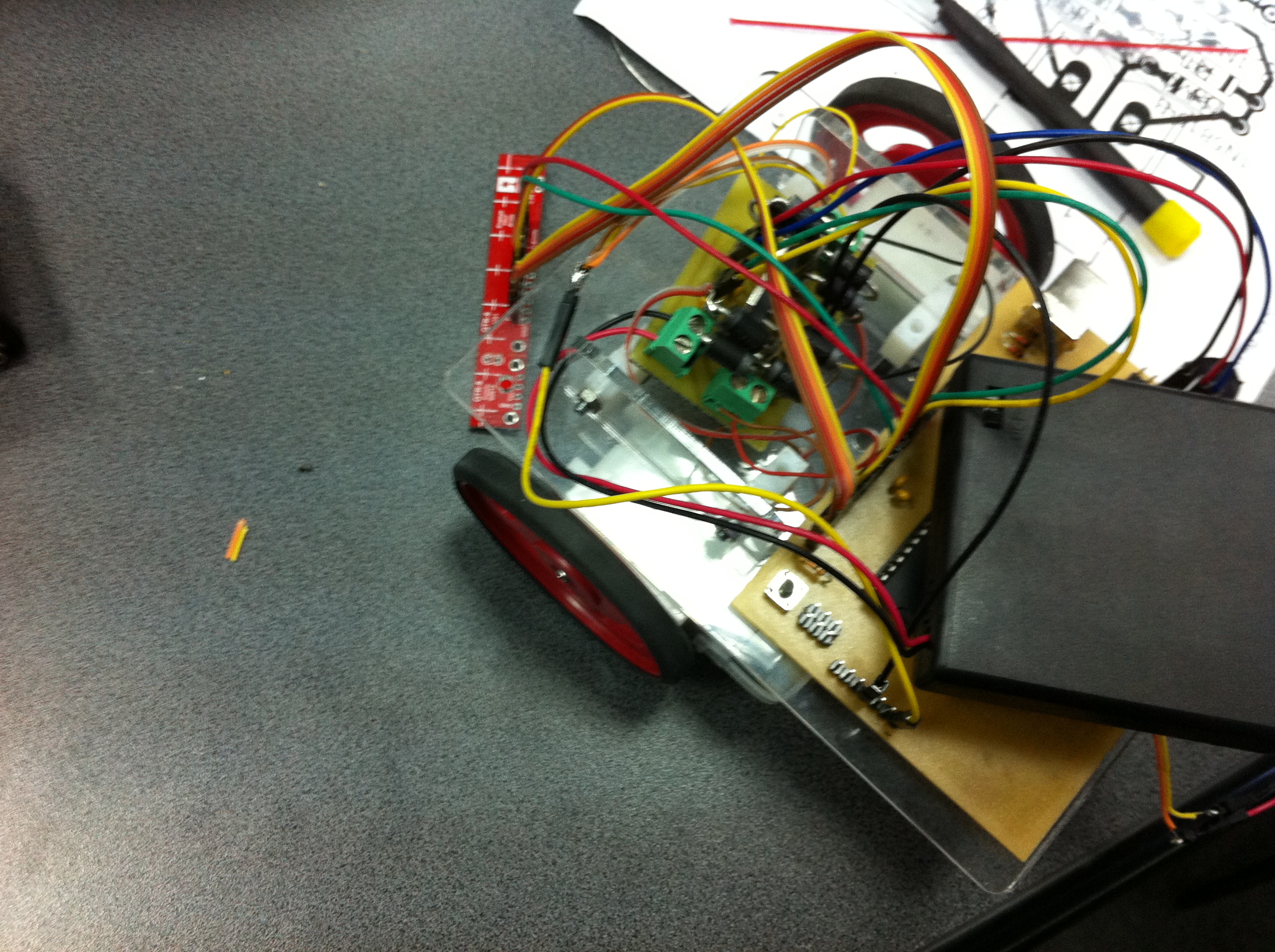
- Asamblare kit robot
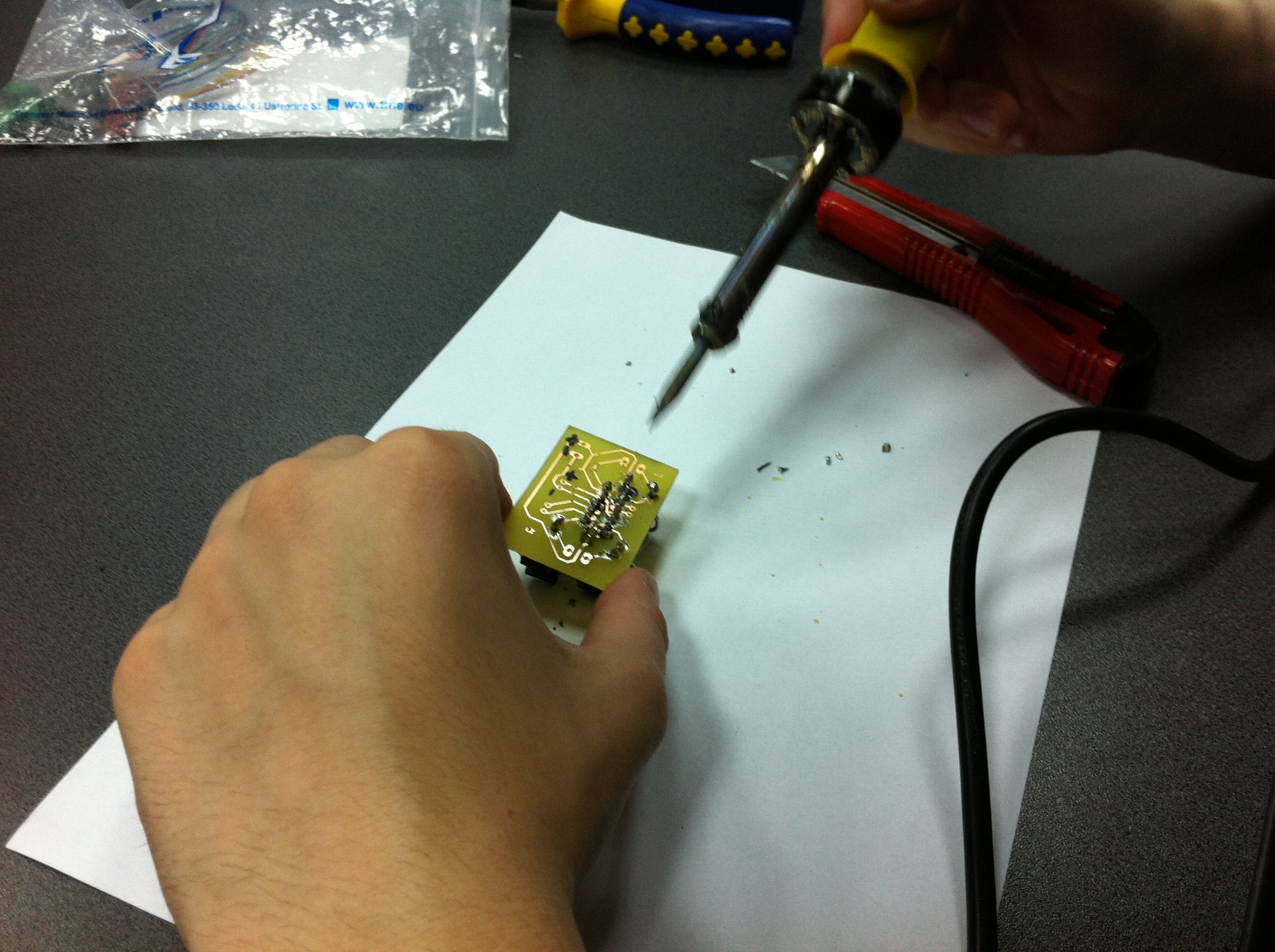
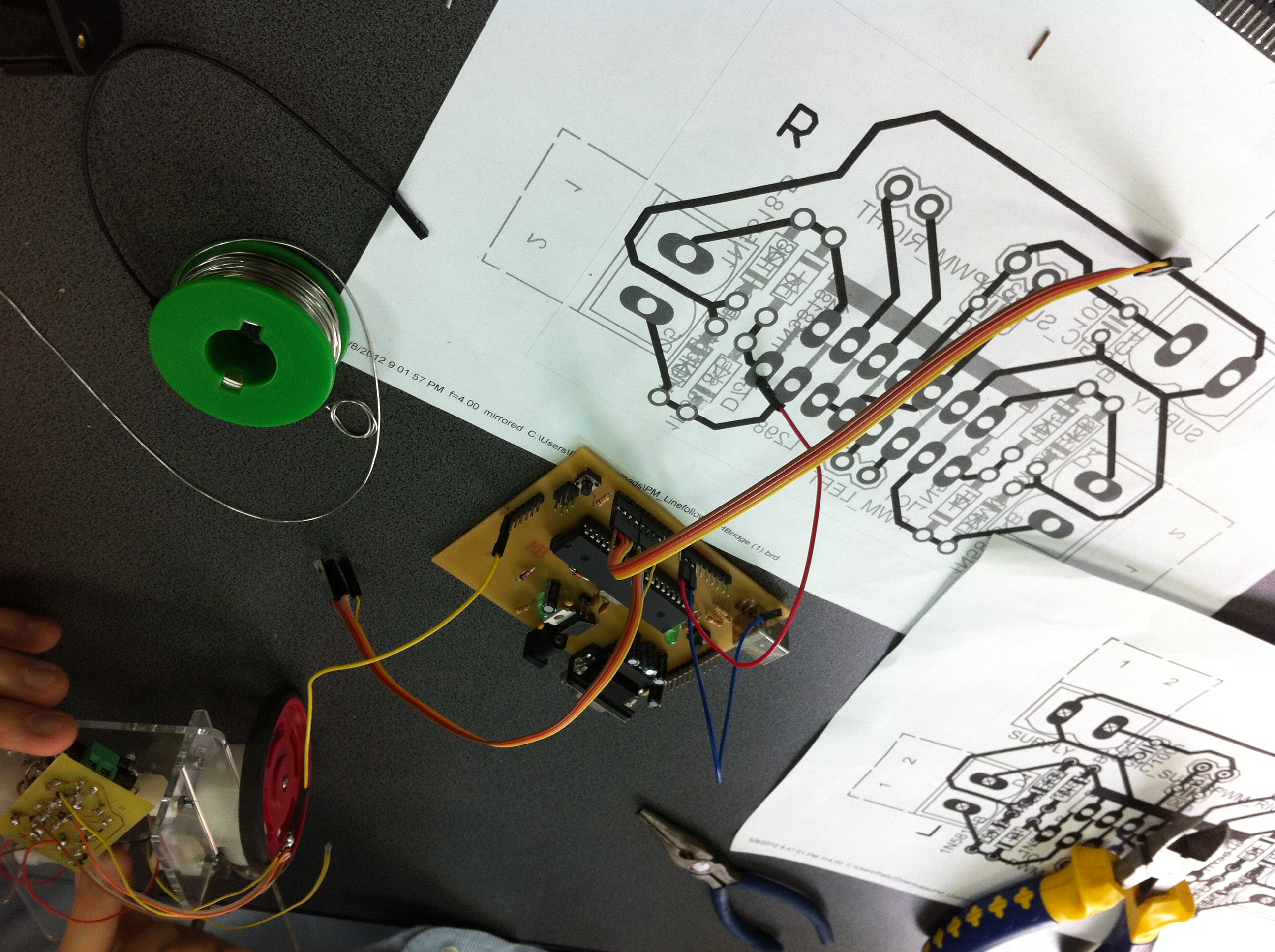
- Lipire componente punte H
- Frustrare din cauza spatiului mic si a fludorului necorespunzator
- Achizitionare fludor de calitate, descris de colegi ca “balsamic”
- Conexiuni finale
- Cod
- Optimizare Cod
Bibliografie/Resurse
Listă cu documente, datasheet-uri, resurse Internet folosite, eventual grupate pe Resurse Software şi Resurse Hardware.